IIC和pwm冲突,该如何解决?
stm32oled使用IIC协议通讯,在开启定时器3输出pwm作电机驱动信号时两者冲突,只有在屏蔽IIC的情况下pwm才能正常输出,尝试过更换IIC引脚,更换定时器,均不能解决问题
参考GPT和自己的思路:根据你的情况描述,可能是因为IIC和PWM占用了同一个引脚,导致两者无法共存。你可以尝试使用两个不同的引脚来分别连接IIC和PWM。另外,你还可以调整PWM的输出占空比,使其不会影响IIC的通讯。如果问题仍无法解决,建议查阅相关的硬件手册或开发文档,了解具体的引脚使用和占用情况,以及可能的解决方案。
不知道你这个问题是否已经解决, 如果还没有解决的话:- 这篇文章:STM32 IIC从机的使用注意点,解决IIC发送第一个字节的数据错误 也许有你想要的答案,你可以看看
- 除此之外, 这篇博客: 使用stm32互补输出PWM波并且控制死区时间,带刹车功能中的 使用stm32互补输出PWM波并且控制死区时间,带刹车功能 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
项目背景:
需要20k带死区时间的互补pwm波连接IGBT驱动器。
使用高级定时器1,CH1——PA8,CH1N——PB13,BKIN——PB12,如果是复用引脚需要打开时钟,注意时钟配置。
主要使用的寄存器为TIM1_BDTR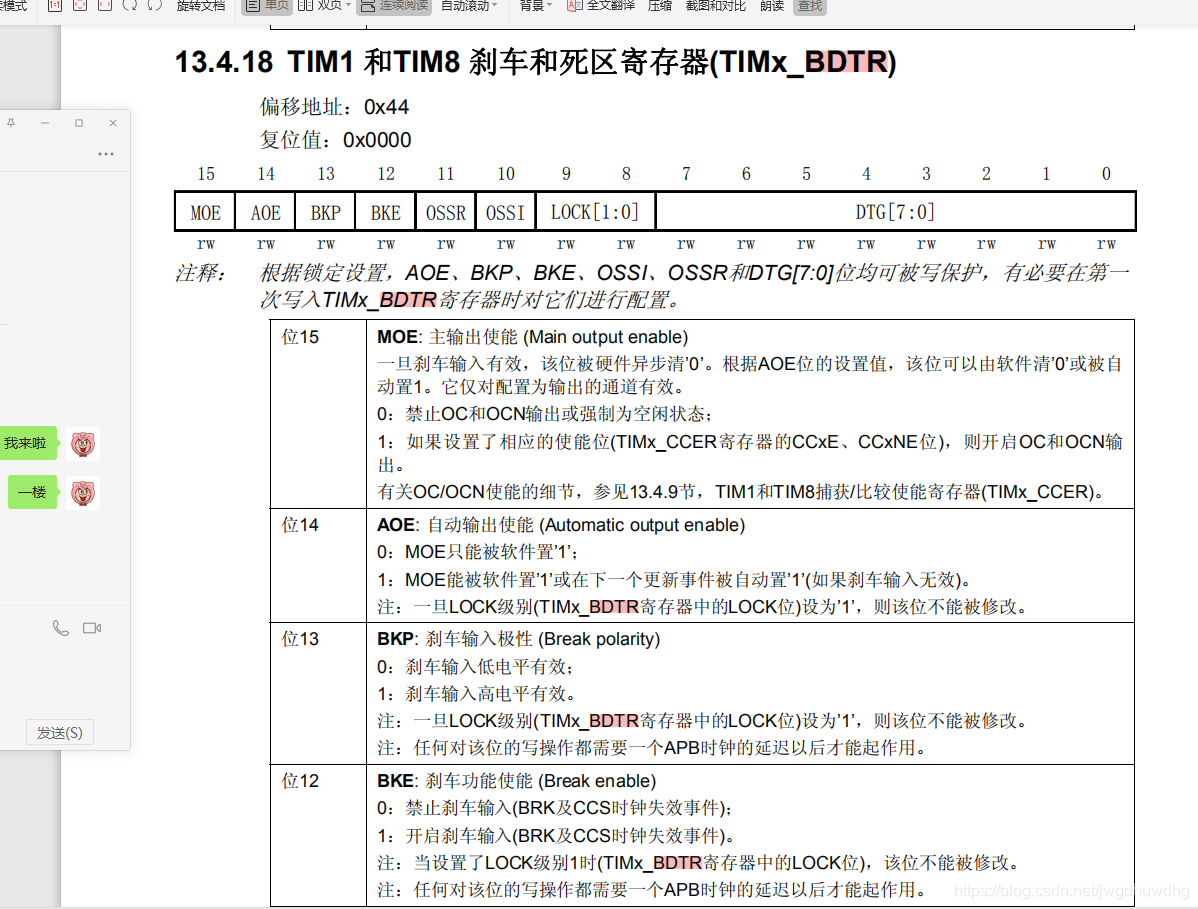
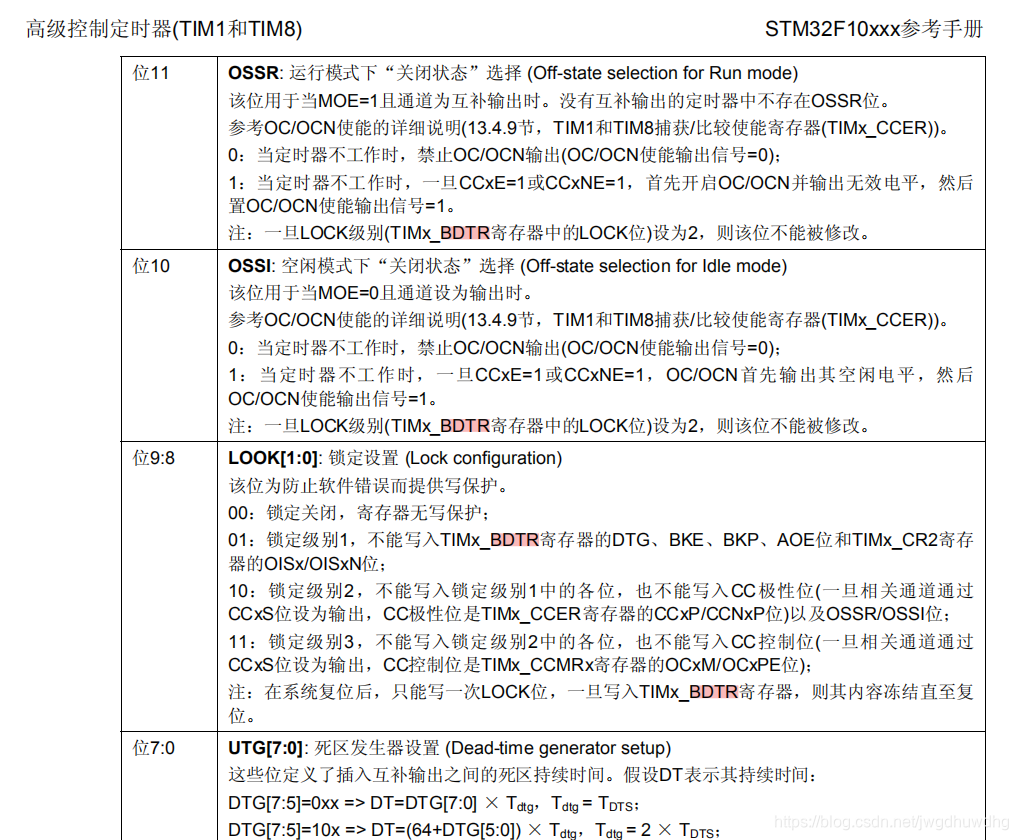

从手册可以看到有些数据位能否修改和LOCK级别有关系。
其中BKIN默认输出低电平,先将频率配置成20kTIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断 TIM_TimeBaseStructure.TIM_Period=359; // 驱动CNT计数器的时钟 = Fck_int/(psc+1) TIM_TimeBaseStructure.TIM_Prescaler= 9; // 时钟分频因子 ,配置死区时间时需要用到 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; // 计数器计数模式,设置为向上计数 TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 重复计数器的值,没用到不用管 TIM_TimeBaseStructure.TIM_RepetitionCounter=0; // 初始化定时器 TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseStructure);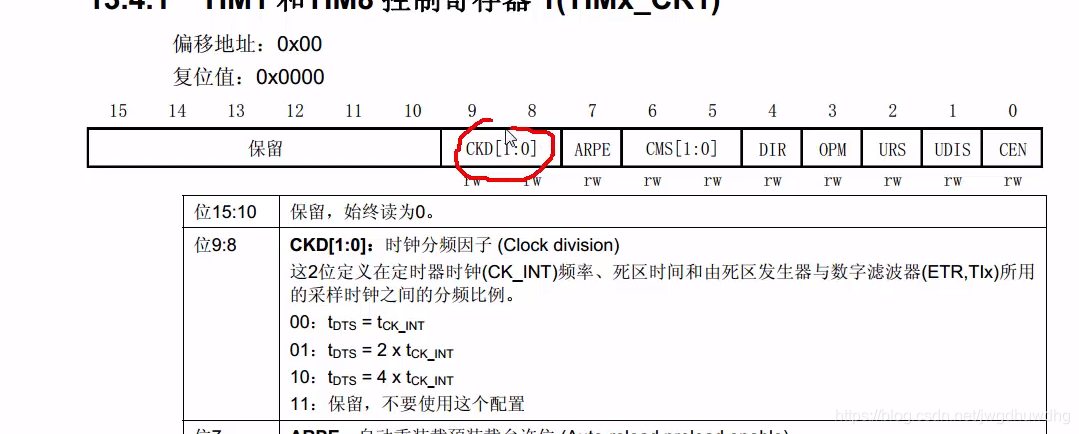
f=72m/(359+1)*(9+1)=20k
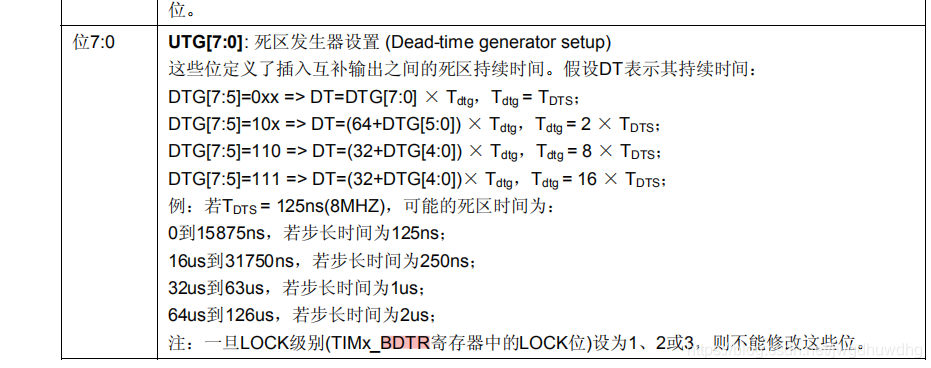
其中TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; 这个语句是指死区时间的分频因子,也可以使用ETR外部时钟,这里是用的内部时钟72m,分频为1.也就是DTS的时间为72m,如果是01就是36m,如果是10就是18m。TIM_OCInitTypeDef TIM_OCInitStructure; // 配置为PWM模式1 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 互补输出使能 TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; // 设置占空比大小 TIM_OCInitStructure.TIM_Pulse =180; // 输出通道电平极性配置 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 互补输出通道电平极性配置 TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; // 输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; // 互补输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; TIM_OC1Init(ADVANCE_TIM, &TIM_OCInitStructure); TIM_OC1PreloadConfig(ADVANCE_TIM, TIM_OCPreload_Enable);TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; // 输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; // 互补输出通道空闲电平极性配置 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; 这两句还挺重要的,就是当使能这个刹车功能了,断路以后,这个通道是高电平还是低电平,也就是占空比为0还是100 之前做项目时就遇到这个问题,一会儿高电平一会低电平,因为控制的是电机,高电平时直接电机最大功率运作了,所以这里也需要注意一下,这个叫空闲电平,也有库函数可以直接调用配置。// 有关刹车和死区结构体的成员具体可参考BDTR寄存器的描述 TIM_BDTRInitTypeDef TIM_BDTRInitStructure; TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; // 输出比较信号死区时间配置,具体如何计算可参考 BDTR:UTG[7:0]的描述 // 这里配置的死区时间为152ns TIM_BDTRInitStructure.TIM_DeadTime = 11; TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable; // 当BKIN引脚检测到高电平的时候,输出比较信号被禁止,就好像是刹车一样 TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; TIM_BDTRConfig(ADVANCE_TIM, &TIM_BDTRInitStructure); // 使能计数器 TIM_Cmd(ADVANCE_TIM, ENABLE); // 主输出使能,当使用的是通用定时器时,这句不需要 TIM_CtrlPWMOutputs(ADVANCE_TIM, ENABLE);这里的死区时间为11,也就是寄存器UTG[7:0],DTS=1/72M,[7:5]这三位是000也就是第一种计算方式,这里配置成11,也就是11/72000000=152ns。只需要修改TIM_DeadTime即可,手册也写的很清楚了,如果是72m,那么死区时间的范围是14ns至17523ns。如果8m,范围是125ns至15875ns。

注:关闭延迟时间的最大值减去开通时间最小值。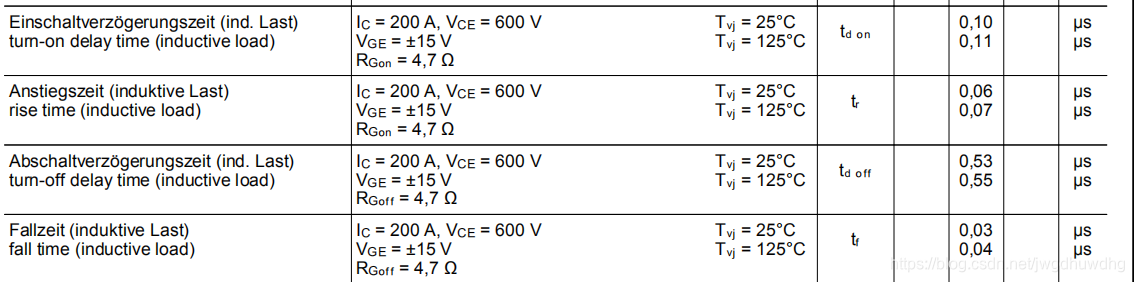
这里是IGBT的参数,所以我们只要设置死区时间为450ns,450/13.89=32.3,也就是33.
主函数初始化就好了。
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^