计算机几何,用C++
问题遇到的现象和发生背景
PDF文档私
只回答一道不给采纳
问题相关代码,请勿粘贴截图
运行结果及报错内容
我的解答思路和尝试过的方法
我想要达到的结果
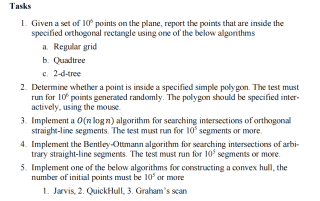
- 在平面上给定一组 10° 的点,使用以下算法之一报告指定正交矩形内的点
a.规则网格b.四叉树c. 二维树 - 判断一个点是否在一个指定的简单多边形内。 测试必须运行随机生成的 10° 点。 应使用鼠标交互式指定多边形。
- 实现一个 O(n logn) 算法来搜索正交直线段的交点。 测试必须运行 103 段或更多段。
- 实现 Bentley-Ottmann 算法来搜索任意直线段的交点。 测试必须运行 105 段或更多段。
- 实现以下任一算法构建凸包,初始点数必须为103个或更多
1.JarvisMarch算法,2.快速凸包算法 ,3.格雷厄姆扫描算法
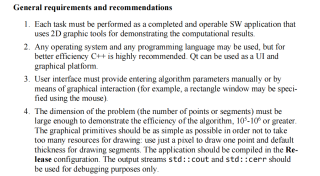
一般要求和建议 - 每个任务都必须作为一个完整且可操作的软件应用程序执行,该应用程序使用 2D 图形工具来演示计算结果。
- 可以使用任何操作系统和任何编程语言,但为了更好的效率,强烈推荐使用C++。Qt可以用作UI和图形平台。
- 用户界面必须提供手动或图形交互方式输入算法参数(例如,可以使用鼠标指定矩形窗口)。
- 问题的维度(点或线段的数量)必须足够大,以证明算法的效率,105-10°或更大。图元应尽可能简单,以免占用太多资源用于绘制:仅使用一个像素绘制一个点,使用默认厚度绘制线段。应用程序应该在 Re-lease 配置中编译。输出流 std :: cout 和 std ::cerr 应该仅用于调试目的。
一定要用C++?
可以使用java实现吗?
你好,这里可以满足计算机几何用C++的需求
https://blog.csdn.net/qq_40998706/category_8668815.html
你好,可以参考这篇文章,上面有不少几何程序。
https://blog.csdn.net/weixin_44078318/article/details/105391999
面向对象程序设计实践(C++)——基本几何形状
基于C++的几何算法大全,双手奉上。
看到很多功能在opencv里都有啊,可以用opencv吗
c++几何大全,看看对你有帮助否
https://blog.csdn.net/HW140701/article/details/53310003?locationNum=10&fps=1
/*
计算几何
目录
㈠ 点的基本运算
1. 平面上两点之间距离 1
2. 判断两点是否重合 1
3. 矢量叉乘 1
4. 矢量点乘 2
5. 判断点是否在线段上 2
6. 求一点饶某点旋转后的坐标 2
7. 求矢量夹角 2
㈡ 线段及直线的基本运算
1. 点与线段的关系 3
2. 求点到线段所在直线垂线的垂足 4
3. 点到线段的最近点 4
4. 点到线段所在直线的距离 4
5. 点到折线集的最近距离 4
6. 判断圆是否在多边形内 5
7. 求矢量夹角余弦 5
8. 求线段之间的夹角 5
9. 判断线段是否相交 6
10.判断线段是否相交但不交在端点处 6
11.求线段所在直线的方程 6
12.求直线的斜率 7
13.求直线的倾斜角 7
14.求点关于某直线的对称点 7
15.判断两条直线是否相交及求直线交点 7
16.判断线段是否相交,如果相交返回交点 7
㈢ 多边形常用算法模块
1. 判断多边形是否简单多边形 8
2. 检查多边形顶点的凸凹性 9
3. 判断多边形是否凸多边形 9
4. 求多边形面积 9
5. 判断多边形顶点的排列方向,方法一 10
6. 判断多边形顶点的排列方向,方法二 10
7. 射线法判断点是否在多边形内 10
8. 判断点是否在凸多边形内 11
9. 寻找点集的graham算法 12
10.寻找点集凸包的卷包裹法 13
11.判断线段是否在多边形内 14
12.求简单多边形的重心 15
13.求凸多边形的重心 17
14.求肯定在给定多边形内的一个点 17
15.求从多边形外一点出发到该多边形的切线 18
16.判断多边形的核是否存在 19
㈣ 圆的基本运算
1 .点是否在圆内 20
2 .求不共线的三点所确定的圆 21
㈤ 矩形的基本运算
1.已知矩形三点坐标,求第4点坐标 22
㈥ 常用算法的描述 22
㈦ 补充
1.两圆关系: 24
2.判断圆是否在矩形内: 24
3.点到平面的距离: 25
4.点是否在直线同侧: 25
5.镜面反射线: 25
6.矩形包含: 26
7.两圆交点: 27
8.两圆公共面积: 28
9. 圆和直线关系: 29
10. 内切圆: 30
11. 求切点: 31
12. 线段的左右旋: 31
13.公式: 32
*/
/* 需要包含的头文件 */
#include <cmath >
/* 常用的常量定义 */
const double INF = 1E200
const double EP = 1E-10
const int MAXV = 300
const double PI = 3.14159265
/* 基本几何结构 */
struct POINT
{
double x;
double y;
POINT(double a=0, double b=0) { x=a; y=b;} //constructor
};
struct LINESEG
{
POINT s;
POINT e;
LINESEG(POINT a, POINT b) { s=a; e=b;}
LINESEG() { }
};
struct LINE // 直线的解析方程 a*x+b*y+c=0 为统一表示,约定 a >= 0
{
double a;
double b;
double c;
LINE(double d1=1, double d2=-1, double d3=0) {a=d1; b=d2; c=d3;}
};
/**********************
* *
* 点的基本运算 *
* *
**********************/
double dist(POINT p1,POINT p2) // 返回两点之间欧氏距离
{
return( sqrt( (p1.x-p2.x)*(p1.x-p2.x)+(p1.y-p2.y)*(p1.y-p2.y) ) );
}
bool equal_point(POINT p1,POINT p2) // 判断两个点是否重合
{
return ( (abs(p1.x-p2.x)<EP)&&(abs(p1.y-p2.y)<EP) );
}
/******************************************************************************
r=multiply(sp,ep,op),得到(sp-op)和(ep-op)的叉积
r>0:ep在矢量opsp的逆时针方向;
r=0:opspep三点共线;
r<0:ep在矢量opsp的顺时针方向
*******************************************************************************/
double multiply(POINT sp,POINT ep,POINT op)
{
return((sp.x-op.x)*(ep.y-op.y)-(ep.x-op.x)*(sp.y-op.y));
}
/*
r=dotmultiply(p1,p2,op),得到矢量(p1-op)和(p2-op)的点积,如果两个矢量都非零矢量
r<0:两矢量夹角为锐角;
r=0:两矢量夹角为直角;
r>0:两矢量夹角为钝角
*******************************************************************************/
double dotmultiply(POINT p1,POINT p2,POINT p0)
{
return ((p1.x-p0.x)*(p2.x-p0.x)+(p1.y-p0.y)*(p2.y-p0.y));
}
/******************************************************************************
判断点p是否在线段l上
条件:(p在线段l所在的直线上) && (点p在以线段l为对角线的矩形内)
*******************************************************************************/
bool online(LINESEG l,POINT p)
{
return( (multiply(l.e,p,l.s)==0) &&( ( (p.x-l.s.x)*(p.x-l.e.x)<=0 )&&( (p.y-l.s.y)*(p.y-l.e.y)<=0 ) ) );
}
// 返回点p以点o为圆心逆时针旋转alpha(单位:弧度)后所在的位置
POINT rotate(POINT o,double alpha,POINT p)
{
POINT tp;
p.x-=o.x;
p.y-=o.y;
tp.x=p.x*cos(alpha)-p.y*sin(alpha)+o.x;
tp.y=p.y*cos(alpha)+p.x*sin(alpha)+o.y;
return tp;
}
/* 返回顶角在o点,起始边为os,终止边为oe的夹角(单位:弧度)
角度小于pi,返回正值
角度大于pi,返回负值
可以用于求线段之间的夹角
原理:
r = dotmultiply(s,e,o) / (dist(o,s)*dist(o,e))
r'= multiply(s,e,o)
r >= 1 angle = 0;
r <= -1 angle = -PI
-1<r<1 && r'>0 angle = arccos(r)
-1<r<1 && r'<=0 angle = -arccos(r)
*/
double angle(POINT o,POINT s,POINT e)
{
double cosfi,fi,norm;
double dsx = s.x - o.x;
double dsy = s.y - o.y;
double dex = e.x - o.x;
double dey = e.y - o.y;
cosfi=dsx*dex+dsy*dey;
norm=(dsx*dsx+dsy*dsy)*(dex*dex+dey*dey);
cosfi /= sqrt( norm );
if (cosfi >= 1.0 ) return 0;
if (cosfi <= -1.0 ) return -3.1415926;
fi=acos(cosfi);
if (dsx*dey-dsy*dex>0) return fi; // 说明矢量os 在矢量 oe的顺时针方向
return -fi;
}
/*****************************\
* *
* 线段及直线的基本运算 *
* *
\*****************************/
/* 判断点与线段的关系,用途很广泛
本函数是根据下面的公式写的,P是点C到线段AB所在直线的垂足
AC dot AB
r = ---------
||AB||^2
(Cx-Ax)(Bx-Ax) + (Cy-Ay)(By-Ay)
= -------------------------------
L^2
r has the following meaning:
r=0 P = A
r=1 P = B
r<0 P is on the backward extension of AB
r>1 P is on the forward extension of AB
0<r<1 P is interior to AB
*/
double relation(POINT p,LINESEG l)
{
LINESEG tl;
tl.s=l.s;
tl.e=p;
return dotmultiply(tl.e,l.e,l.s)/(dist(l.s,l.e)*dist(l.s,l.e));
}
// 求点C到线段AB所在直线的垂足 P
POINT perpendicular(POINT p,LINESEG l)
{
double r=relation(p,l);
POINT tp;
tp.x=l.s.x+r*(l.e.x-l.s.x);
tp.y=l.s.y+r*(l.e.y-l.s.y);
return tp;
}
/* 求点p到线段l的最短距离,并返回线段上距该点最近的点np
注意:np是线段l上到点p最近的点,不一定是垂足 */
double ptolinesegdist(POINT p,LINESEG l,POINT &np)
{
double r=relation(p,l);
if(r<0)
{
np=l.s;
return dist(p,l.s);
}
if(r>1)
{
np=l.e;
return dist(p,l.e);
}
np=perpendicular(p,l);
return dist(p,np);
}
// 求点p到线段l所在直线的距离,请注意本函数与上个函数的区别
double ptoldist(POINT p,LINESEG l)
{
return abs(multiply(p,l.e,l.s))/dist(l.s,l.e);
}
/* 计算点到折线集的最近距离,并返回最近点.
注意:调用的是ptolineseg()函数 */
double ptopointset(int vcount,POINT pointset[],POINT p,POINT &q)
{
int i;
double cd=double(INF),td;
LINESEG l;
POINT tq,cq;
for(i=0;i<vcount-1;i++)
{
l.s=pointset[i];
l.e=pointset[i+1];
td=ptolinesegdist(p,l,tq);
if(td<cd)
{
cd=td;
cq=tq;
}
}
q=cq;
return cd;
}
/* 判断圆是否在多边形内.ptolineseg()函数的应用2 */
bool CircleInsidePolygon(int vcount,POINT center,double radius,POINT polygon[])
{
POINT q;
double d;
q.x=0;
q.y=0;
d=ptopointset(vcount,polygon,center,q);
if(d<radius||fabs(d-radius)<EP)
return true;
else
return false;
}
/* 返回两个矢量l1和l2的夹角的余弦(-1 --- 1)注意:如果想从余弦求夹角的话,注意反余弦函数的定义域是从 0到pi */
double cosine(LINESEG l1,LINESEG l2)
{
return (((l1.e.x-l1.s.x)*(l2.e.x-l2.s.x) +
(l1.e.y-l1.s.y)*(l2.e.y-l2.s.y))/(dist(l1.e,l1.s)*dist(l2.e,l2.s))) );
}
// 返回线段l1与l2之间的夹角 单位:弧度 范围(-pi,pi)
double lsangle(LINESEG l1,LINESEG l2)
{
POINT o,s,e;
o.x=o.y=0;
s.x=l1.e.x-l1.s.x;
s.y=l1.e.y-l1.s.y;
e.x=l2.e.x-l2.s.x;
e.y=l2.e.y-l2.s.y;
return angle(o,s,e);
}
// 如果线段u和v相交(包括相交在端点处)时,返回true
//
//判断P1P2跨立Q1Q2的依据是:( P1 - Q1 ) × ( Q2 - Q1 ) * ( Q2 - Q1 ) × ( P2 - Q1 ) >= 0。
//判断Q1Q2跨立P1P2的依据是:( Q1 - P1 ) × ( P2 - P1 ) * ( P2 - P1 ) × ( Q2 - P1 ) >= 0。
bool intersect(LINESEG u,LINESEG v)
{
return( (max(u.s.x,u.e.x)>=min(v.s.x,v.e.x))&& //排斥实验
(max(v.s.x,v.e.x)>=min(u.s.x,u.e.x))&&
(max(u.s.y,u.e.y)>=min(v.s.y,v.e.y))&&
(max(v.s.y,v.e.y)>=min(u.s.y,u.e.y))&&
(multiply(v.s,u.e,u.s)*multiply(u.e,v.e,u.s)>=0)&& //跨立实验
(multiply(u.s,v.e,v.s)*multiply(v.e,u.e,v.s)>=0));
}
// (线段u和v相交)&&(交点不是双方的端点) 时返回true
bool intersect_A(LINESEG u,LINESEG v)
{
return ((intersect(u,v))&&
(!online(u,v.s))&&
(!online(u,v.e))&&
(!online(v,u.e))&&
(!online(v,u.s)));
}
// 线段v所在直线与线段u相交时返回true;方法:判断线段u是否跨立线段v
bool intersect_l(LINESEG u,LINESEG v)
{
return multiply(u.s,v.e,v.s)*multiply(v.e,u.e,v.s)>=0;
}
// 根据已知两点坐标,求过这两点的直线解析方程: a*x+b*y+c = 0 (a >= 0)
LINE makeline(POINT p1,POINT p2)
{
LINE tl;
int sign = 1;
tl.a=p2.y-p1.y;
if(tl.a<0)
{
sign = -1;
tl.a=sign*tl.a;
}
tl.b=sign*(p1.x-p2.x);
tl.c=sign*(p1.y*p2.x-p1.x*p2.y);
return tl;
}
// 根据直线解析方程返回直线的斜率k,水平线返回 0,竖直线返回 1e200
double slope(LINE l)
{
if(abs(l.a) < 1e-20)
return 0;
if(abs(l.b) < 1e-20)
return INF;
return -(l.a/l.b);
}
// 返回直线的倾斜角alpha ( 0 - pi)
double alpha(LINE l)
{
if(abs(l.a)< EP)
return 0;
if(abs(l.b)< EP)
return PI/2;
double k=slope(l);
if(k>0)
return atan(k);
else
return PI+atan(k);
}
// 求点p关于直线l的对称点
POINT symmetry(LINE l,POINT p)
{
POINT tp;
tp.x=((l.b*l.b-l.a*l.a)*p.x-2*l.a*l.b*p.y-2*l.a*l.c)/(l.a*l.a+l.b*l.b);
tp.y=((l.a*l.a-l.b*l.b)*p.y-2*l.a*l.b*p.x-2*l.b*l.c)/(l.a*l.a+l.b*l.b);
return tp;
}
// 如果两条直线 l1(a1*x+b1*y+c1 = 0), l2(a2*x+b2*y+c2 = 0)相交,返回true,且返回交点p
bool lineintersect(LINE l1,LINE l2,POINT &p) // 是 L1,L2
{
double d=l1.a*l2.b-l2.a*l1.b;
if(abs(d)<EP) // 不相交
return false;
p.x = (l2.c*l1.b-l1.c*l2.b)/d;
p.y = (l2.a*l1.c-l1.a*l2.c)/d;
return true;
}
// 如果线段l1和l2相交,返回true且交点由(inter)返回,否则返回false
bool intersection(LINESEG l1,LINESEG l2,POINT &inter)
{
LINE ll1,ll2;
ll1=makeline(l1.s,l1.e);
ll2=makeline(l2.s,l2.e);
if(lineintersect(ll1,ll2,inter))
return online(l1,inter);
else
return false;
}
/******************************\
* *
* 多边形常用算法模块 *
* *
\******************************/
// 如果无特别说明,输入多边形顶点要求按逆时针排列
/*
返回值:输入的多边形是简单多边形,返回true
要 求:输入顶点序列按逆时针排序
说 明:简单多边形定义:
1:循环排序中相邻线段对的交是他们之间共有的单个点
2:不相邻的线段不相交
本程序默认第一个条件已经满足
*/
bool issimple(int vcount,POINT polygon[])
{
int i,cn;
LINESEG l1,l2;
for(i=0;i<vcount;i++)
{
l1.s=polygon[i];
l1.e=polygon[(i+1)%vcount];
cn=vcount-3;
while(cn)
{
l2.s=polygon[(i+2)%vcount];
l2.e=polygon[(i+3)%vcount];
if(intersect(l1,l2))
break;
cn--;
}
if(cn)
return false;
}
return true;
}
// 返回值:按输入顺序返回多边形顶点的凸凹性判断,bc[i]=1,iff:第i个顶点是凸顶点
void checkconvex(int vcount,POINT polygon[],bool bc[])
{
int i,index=0;
POINT tp=polygon[0];
for(i=1;i<vcount;i++) // 寻找第一个凸顶点
{
if(polygon[i].y<tp.y||(polygon[i].y == tp.y&&polygon[i].x<tp.x))
{
tp=polygon[i];
index=i;
}
}
int count=vcount-1;
bc[index]=1;
while(count) // 判断凸凹性
{
if(multiply(polygon[(index+1)%vcount],polygon[(index+2)%vcount],polygon[index])>=0 )
bc[(index+1)%vcount]=1;
else
bc[(index+1)%vcount]=0;
index++;
count--;
}
}
// 返回值:多边形polygon是凸多边形时,返回true
bool isconvex(int vcount,POINT polygon[])
{
bool bc[MAXV];
checkconvex(vcount,polygon,bc);
for(int i=0;i<vcount;i++) // 逐一检查顶点,是否全部是凸顶点
if(!bc[i])
return false;
return true;
}
// 返回多边形面积(signed);输入顶点按逆时针排列时,返回正值;否则返回负值
double area_of_polygon(int vcount,POINT polygon[])
{
int i;
double s;
if (vcount<3)
return 0;
s=polygon[0].y*(polygon[vcount-1].x-polygon[1].x);
for (i=1;i<vcount;i++)
s+=polygon[i].y*(polygon[(i-1)].x-polygon[(i+1)%vcount].x);
return s/2;
}
// 如果输入顶点按逆时针排列,返回true
bool isconterclock(int vcount,POINT polygon[])
{
return area_of_polygon(vcount,polygon)>0;
}
// 另一种判断多边形顶点排列方向的方法
bool isccwize(int vcount,POINT polygon[])
{
int i,index;
POINT a,b,v;
v=polygon[0];
index=0;
for(i=1;i<vcount;i++) // 找到最低且最左顶点,肯定是凸顶点
{
if(polygon[i].y<v.y||polygon[i].y == v.y && polygon[i].x<v.x)
{
index=i;
}
}
a=polygon[(index-1+vcount)%vcount]; // 顶点v的前一顶点
b=polygon[(index+1)%vcount]; // 顶点v的后一顶点
return multiply(v,b,a)>0;
}
/********************************************************************************************
射线法判断点q与多边形polygon的位置关系,要求polygon为简单多边形,顶点逆时针排列
如果点在多边形内: 返回0
如果点在多边形边上: 返回1
如果点在多边形外: 返回2
*********************************************************************************************/
int insidepolygon(int vcount,POINT Polygon[],POINT q)
{
int c=0,i,n;
LINESEG l1,l2;
bool bintersect_a,bonline1,bonline2,bonline3;
double r1,r2;
l1.s=q;
l1.e=q;
l1.e.x=double(INF);
n=vcount;
for (i=0;i<vcount;i++)
{
l2.s=Polygon[i];
l2.e=Polygon[(i+1)%n];
if(online(l2,q))
return 1; // 如果点在边上,返回1
if ( (bintersect_a=intersect_A(l1,l2))|| // 相交且不在端点
( (bonline1=online(l1,Polygon[(i+1)%n]))&& // 第二个端点在射线上
( (!(bonline2=online(l1,Polygon[(i+2)%n])))&& /* 前一个端点和后一个端点在射线两侧 */
((r1=multiply(Polygon[i],Polygon[(i+1)%n],l1.s)*multiply(Polygon[(i+1)%n],Polygon[(i+2)%n],l1.s))>0) ||
(bonline3=online(l1,Polygon[(i+2)%n]))&& /* 下一条边是水平线,前一个端点和后一个端点在射线两侧 */
((r2=multiply(Polygon[i],Polygon[(i+2)%n],l1.s)*multiply(Polygon[(i+2)%n],
Polygon[(i+3)%n],l1.s))>0)
)
)
) c++;
}
if(c%2 == 1)
return 0;
else
return 2;
}
//点q是凸多边形polygon内时,返回true;注意:多边形polygon一定要是凸多边形
bool InsideConvexPolygon(int vcount,POINT polygon[],POINT q) // 可用于三角形!
{
POINT p;
LINESEG l;
int i;
p.x=0;p.y=0;
for(i=0;i<vcount;i++) // 寻找一个肯定在多边形polygon内的点p:多边形顶点平均值
{
p.x+=polygon[i].x;
p.y+=polygon[i].y;
}
p.x /= vcount;
p.y /= vcount;
for(i=0;i<vcount;i++)
{
l.s=polygon[i];l.e=polygon[(i+1)%vcount];
if(multiply(p,l.e,l.s)*multiply(q,l.e,l.s)<0) /* 点p和点q在边l的两侧,说明点q肯定在多边形外 */
break;
}
return (i==vcount);
}
/**********************************************
寻找凸包的graham 扫描法
PointSet为输入的点集;
ch为输出的凸包上的点集,按照逆时针方向排列;
n为PointSet中的点的数目
len为输出的凸包上的点的个数
**********************************************/
void Graham_scan(POINT PointSet[],POINT ch[],int n,int &len)
{
int i,j,k=0,top=2;
POINT tmp;
// 选取PointSet中y坐标最小的点PointSet[k],如果这样的点有多个,则取最左边的一个
for(i=1;i<n;i++)
if ( PointSet[i].y<PointSet[k].y || (PointSet[i].y==PointSet[k].y) && (PointSet[i].x<PointSet[k].x) )
k=i;
tmp=PointSet[0];
PointSet[0]=PointSet[k];
PointSet[k]=tmp; // 现在PointSet中y坐标最小的点在PointSet[0]
for (i=1;i<n-1;i++) /* 对顶点按照相对PointSet[0]的极角从小到大进行排序,极角相同的按照距离PointSet[0]从近到远进行排序 */
{
k=i;
for (j=i+1;j<n;j++)
if ( multiply(PointSet[j],PointSet[k],PointSet[0])>0 || // 极角更小
(multiply(PointSet[j],PointSet[k],PointSet[0])==0) && /* 极角相等,距离更短 */
dist(PointSet[0],PointSet[j])<dist(PointSet[0],PointSet[k])
)
k=j;
tmp=PointSet[i];
PointSet[i]=PointSet[k];
PointSet[k]=tmp;
}
ch[0]=PointSet[0];
ch[1]=PointSet[1];
ch[2]=PointSet[2];
for (i=3;i<n;i++)
{
while (multiply(PointSet[i],ch[top],ch[top-1])>=0)
top--;
ch[++top]=PointSet[i];
}
len=top+1;
}
// 卷包裹法求点集凸壳,参数说明同graham算法
void ConvexClosure(POINT PointSet[],POINT ch[],int n,int &len)
{
int top=0,i,index,first;
double curmax,curcos,curdis;
POINT tmp;
LINESEG l1,l2;
bool use[MAXV];
tmp=PointSet[0];
index=0;
// 选取y最小点,如果多于一个,则选取最左点
for(i=1;i<n;i++)
{
if(PointSet[i].y<tmp.y||PointSet[i].y == tmp.y&&PointSet[i].x<tmp.x)
{
index=i;
}
use[i]=false;
}
tmp=PointSet[index];
first=index;
use[index]=true;
index=-1;
ch[top++]=tmp;
tmp.x-=100;
l1.s=tmp;
l1.e=ch[0];
l2.s=ch[0];
while(index!=first)
{
curmax=-100;
curdis=0;
// 选取与最后一条确定边夹角最小的点,即余弦值最大者
for(i=0;i<n;i++)
{
if(use[i])continue;
l2.e=PointSet[i];
curcos=cosine(l1,l2); // 根据cos值求夹角余弦,范围在 (-1 -- 1 )
if(curcos>curmax || fabs(curcos-curmax)<1e-6 && dist(l2.s,l2.e)>curdis)
{
curmax=curcos;
index=i;
curdis=dist(l2.s,l2.e);
}
}
use[first]=false; //清空第first个顶点标志,使最后能形成封闭的hull
use[index]=true;
ch[top++]=PointSet[index];
l1.s=ch[top-2];
l1.e=ch[top-1];
l2.s=ch[top-1];
}
len=top-1;
}
/*********************************************************************************************
判断线段是否在简单多边形内(注意:如果多边形是凸多边形,下面的算法可以化简)
必要条件一:线段的两个端点都在多边形内;
必要条件二:线段和多边形的所有边都不内交;
用途: 1. 判断折线是否在简单多边形内
2. 判断简单多边形是否在另一个简单多边形内
**********************************************************************************************/
bool LinesegInsidePolygon(int vcount,POINT polygon[],LINESEG l)
{
// 判断线端l的端点是否不都在多边形内
if(!insidepolygon(vcount,polygon,l.s)||!insidepolygon(vcount,polygon,l.e))
return false;
int top=0,i,j;
POINT PointSet[MAXV],tmp;
LINESEG s;
for(i=0;i<vcount;i++)
{
s.s=polygon[i];
s.e=polygon[(i+1)%vcount];
if(online(s,l.s)) //线段l的起始端点在线段s上
PointSet[top++]=l.s;
else if(online(s,l.e)) //线段l的终止端点在线段s上
PointSet[top++]=l.e;
else
{
if(online(l,s.s)) //线段s的起始端点在线段l上
PointSet[top++]=s.s;
else if(online(l,s.e)) // 线段s的终止端点在线段l上
PointSet[top++]=s.e;
else
{
if(intersect(l,s)) // 这个时候如果相交,肯定是内交,返回false
return false;
}
}
}
for(i=0;i<top-1;i++) /* 冒泡排序,x坐标小的排在前面;x坐标相同者,y坐标小的排在前面 */
{
for(j=i+1;j<top;j++)
{
if( PointSet[i].x>PointSet[j].x || fabs(PointSet[i].x-PointSet[j].x)<EP && PointSet[i].y>PointSet[j].y )
{
tmp=PointSet[i];
PointSet[i]=PointSet[j];
PointSet[j]=tmp;
}
}
}
for(i=0;i<top-1;i++)
{
tmp.x=(PointSet[i].x+PointSet[i+1].x)/2; //得到两个相邻交点的中点
tmp.y=(PointSet[i].y+PointSet[i+1].y)/2;
if(!insidepolygon(vcount,polygon,tmp))
return false;
}
return true;
}
/*********************************************************************************************
求任意简单多边形polygon的重心
需要调用下面几个函数:
void AddPosPart(); 增加右边区域的面积
void AddNegPart(); 增加左边区域的面积
void AddRegion(); 增加区域面积
在使用该程序时,如果把xtr,ytr,wtr,xtl,ytl,wtl设成全局变量就可以使这些函数的形式得到化简,
但要注意函数的声明和调用要做相应变化
**********************************************************************************************/
void AddPosPart(double x, double y, double w, double &xtr, double &ytr, double &wtr)
{
if (abs(wtr + w)<1e-10 ) return; // detect zero regions
xtr = ( wtr*xtr + w*x ) / ( wtr + w );
ytr = ( wtr*ytr + w*y ) / ( wtr + w );
wtr = w + wtr;
return;
}
void AddNegPart(double x, ouble y, double w, double &xtl, double &ytl, double &wtl)
{
if ( abs(wtl + w)<1e-10 )
return; // detect zero regions
xtl = ( wtl*xtl + w*x ) / ( wtl + w );
ytl = ( wtl*ytl + w*y ) / ( wtl + w );
wtl = w + wtl;
return;
}
void AddRegion ( double x1, double y1, double x2, double y2, double &xtr, double &ytr,
double &wtr, double &xtl, double &ytl, double &wtl )
{
if ( abs (x1 - x2)< 1e-10 )
return;
if ( x2 > x1 )
{
AddPosPart ((x2+x1)/2, y1/2, (x2-x1) * y1,xtr,ytr,wtr); /* rectangle 全局变量变化处 */
AddPosPart ((x1+x2+x2)/3, (y1+y1+y2)/3, (x2-x1)*(y2-y1)/2,xtr,ytr,wtr);
// triangle 全局变量变化处
}
else
{
AddNegPart ((x2+x1)/2, y1/2, (x2-x1) * y1,xtl,ytl,wtl);
// rectangle 全局变量变化处
AddNegPart ((x1+x2+x2)/3, (y1+y1+y2)/3, (x2-x1)*(y2-y1)/2,xtl,ytl,wtl);
// triangle 全局变量变化处
}
}
POINT cg_simple(int vcount,POINT polygon[])
{
double xtr,ytr,wtr,xtl,ytl,wtl;
//注意: 如果把xtr,ytr,wtr,xtl,ytl,wtl改成全局变量后这里要删去
POINT p1,p2,tp;
xtr = ytr = wtr = 0.0;
xtl = ytl = wtl = 0.0;
for(int i=0;i<vcount;i++)
{
p1=polygon[i];
p2=polygon[(i+1)%vcount];
AddRegion(p1.x,p1.y,p2.x,p2.y,xtr,ytr,wtr,xtl,ytl,wtl); //全局变量变化处
}
tp.x = (wtr*xtr + wtl*xtl) / (wtr + wtl);
tp.y = (wtr*ytr + wtl*ytl) / (wtr + wtl);
return tp;
}
// 求凸多边形的重心,要求输入多边形按逆时针排序
POINT gravitycenter(int vcount,POINT polygon[])
{
POINT tp;
double x,y,s,x0,y0,cs,k;
x=0;y=0;s=0;
for(int i=1;i<vcount-1;i++)
{
x0=(polygon[0].x+polygon[i].x+polygon[i+1].x)/3;
y0=(polygon[0].y+polygon[i].y+polygon[i+1].y)/3; //求当前三角形的重心
cs=multiply(polygon[i],polygon[i+1],polygon[0])/2;
//三角形面积可以直接利用该公式求解
if(abs(s)<1e-20)
{
x=x0;y=y0;s+=cs;continue;
}
k=cs/s; //求面积比例
x=(x+k*x0)/(1+k);
y=(y+k*y0)/(1+k);
s += cs;
}
tp.x=x;
tp.y=y;
return tp;
}
/************************************************
给定一简单多边形,找出一个肯定在该多边形内的点
定理1 :每个多边形至少有一个凸顶点
定理2 :顶点数>=4的简单多边形至少有一条对角线
结论 : x坐标最大,最小的点肯定是凸顶点
y坐标最大,最小的点肯定是凸顶点
************************************************/
POINT a_point_insidepoly(int vcount,POINT polygon[])
{
POINT v,a,b,r;
int i,index;
v=polygon[0];
index=0;
for(i=1;i<vcount;i++) //寻找一个凸顶点
{
if(polygon[i].y<v.y)
{
v=polygon[i];
index=i;
}
}
a=polygon[(index-1+vcount)%vcount]; //得到v的前一个顶点
b=polygon[(index+1)%vcount]; //得到v的后一个顶点
POINT tri[3],q;
tri[0]=a;tri[1]=v;tri[2]=b;
double md=INF;
int in1=index;
bool bin=false;
for(i=0;i<vcount;i++) //寻找在三角形avb内且离顶点v最近的顶点q
{
if(i == index)continue;
if(i == (index-1+vcount)%vcount)continue;
if(i == (index+1)%vcount)continue;
if(!InsideConvexPolygon(3,tri,polygon[i]))continue;
bin=true;
if(dist(v,polygon[i])<md)
{
q=polygon[i];
md=dist(v,q);
}
}
if(!bin) //没有顶点在三角形avb内,返回线段ab中点
{
r.x=(a.x+b.x)/2;
r.y=(a.y+b.y)/2;
return r;
}
r.x=(v.x+q.x)/2; //返回线段vq的中点
r.y=(v.y+q.y)/2;
return r;
}