首页
编程
java
php
前端
首页
编程
java
php
前端
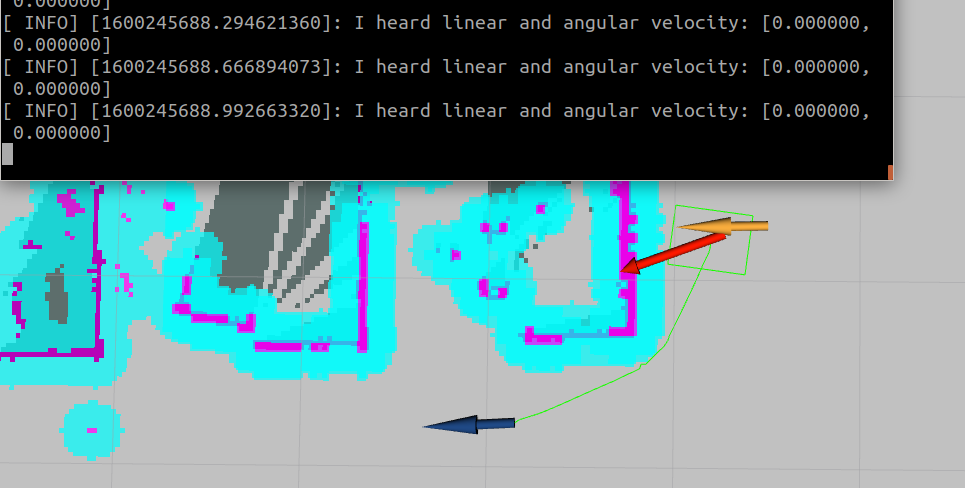
ROS在进行导航时,出现一直下发角速度和线速度为0的情况
如图所示,在存在路径规划的情况下,一直下发线速度和角速度为0 的情况。
局部规划采用的是DWA算法
全局规划采用的是Dijkstra.
膨胀系数设置是15厘米。 小车放置在一个空旷区域
https://blog.csdn.net/qq_29320587/article/details/104842330
点击展开全文