串口接收ADC数据发送到上位机,串口代码如和写
有会用英飞凌ADS写串口函数接收ADC数据之后发送到电脑上位机查看的吗?串口方面的函数实在不会写,求个注释详细的例程,蟹蟹了
不知道你这个问题是否已经解决, 如果还没有解决的话:- 这有个类似的问题, 你可以参考下: https://ask.csdn.net/questions/7778782
- 你也可以参考下这篇文章:ADC知识(2)——直流参数(输入电压参考,参考电流输入,积分非线性误差,差分非线性误差)
- 除此之外, 这篇博客: 单片机ADC采样算法之卡尔曼滤波中的 单片机ADC采样算法 之 卡尔曼滤波 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
算法的核心思想是,根据当前的仪器"测量值" 和上一刻的 “预测量” 和 “误差”,计算得到当前的最优量.再预测下一刻的量, 里面比较突出的是观点是. 把误差纳入计算, 而且分为预测误差和测量误差两种.通称为 噪声. 还有一个非常大的特点是,误差独立存在, 始终不受测量数据的影响。
下来先了解一个卡尔曼滤波中几个参数的含义:概率(Probability),随即变量(Random Variable),高斯或正态分配(Gaussian Distribution)还有State-space Model等等。
关于卡尔曼公式的含义及推导,网上已经有很多文章了,这里不在赘述,直接看C代码的实现。
/*
R值固定,Q值越大,代表越信任测量值,Q值无穷大,代表只用测量值。 Q值越小,代表越信任模型预测值,Q值为0,代表只用模型预测值。*/
//参数一
float KalmanFilter( float inData )
{
static float prevData = 0; //上一个数据 static float p = 10, q = 0.001, r = 0.001, kGain = 0; // q 控制误差 r 控制响应速度 p = p + q; kGain = p / ( p + r ); //计算卡尔曼增益 inData = prevData + ( kGain * ( inData - prevData ) ); //计算本次滤波估计值 p = ( 1 - kGain ) * p; //更新测量方差 prevData = inData; return inData; //返回估计值}
现在测试一下卡尔曼滤波的效果,通过函数发生器产生一个锯齿波,送到单片机的AD口,单片机读取采集到的AD数据后,经过卡尔曼滤波算法,然后将采样的数据和滤波后的数据通过串口发生出来,并在串口波形显示软件上显示。

void main( void )
{
while( 1 ) { val1 = ReadVol_CH3(); //读取AD采样数据 dat = ( float )val1; dat = KalmanFilter( dat ); //卡尔曼滤波 printf("A%drn",val1); //打印结果 printf("B%2frn",dat); }}
现在看一下滤波的结果
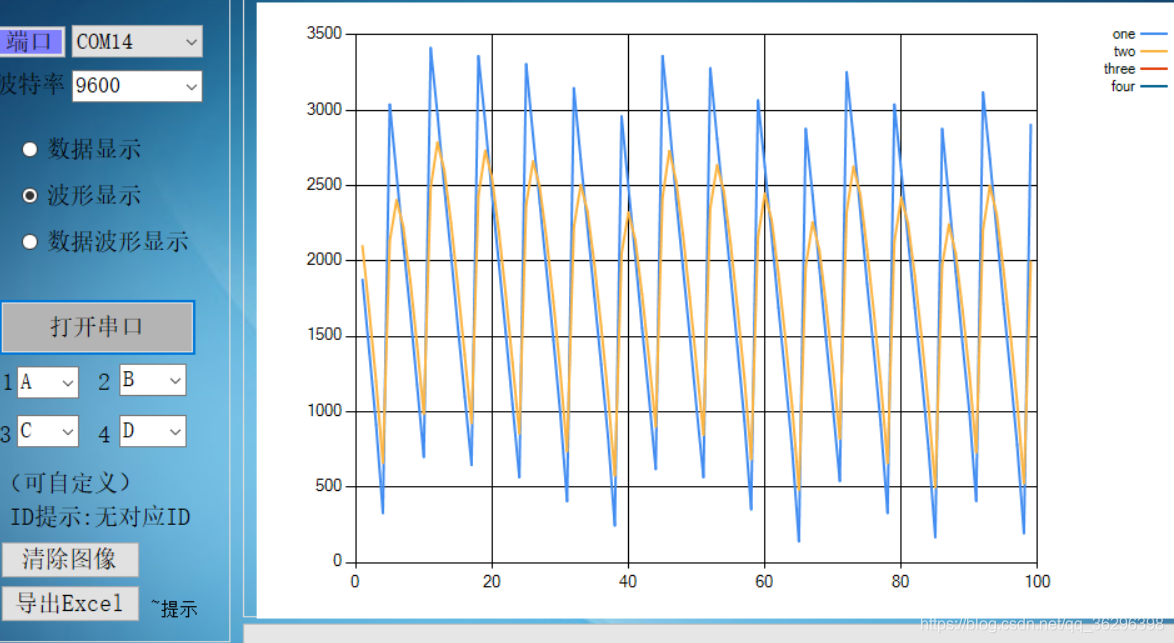
蓝色曲线为原始采样的数据曲线,橙色曲线为经过卡尔曼滤波后的曲线。
下面改变Q和R的值在测试一下滤波效果。
修改后的参数如下
//参数二
unsigned long kalman_filter( unsigned long ADC_Value )
{
float LastData; float NowData; float kalman_adc; static float kalman_adc_old = 0; static float P1; static float Q = 0.0003; static float R = 5; static float Kg = 0; static float P = 1; NowData = ADC_Value; LastData = kalman_adc_old; P = P1 + Q; Kg = P / ( P + R ); kalman_adc = LastData + Kg * ( NowData - kalman_adc_old ); P1 = ( 1 - Kg ) * P; P = P1; kalman_adc_old = kalman_adc; return ( unsigned long )( kalman_adc );}
测试波形
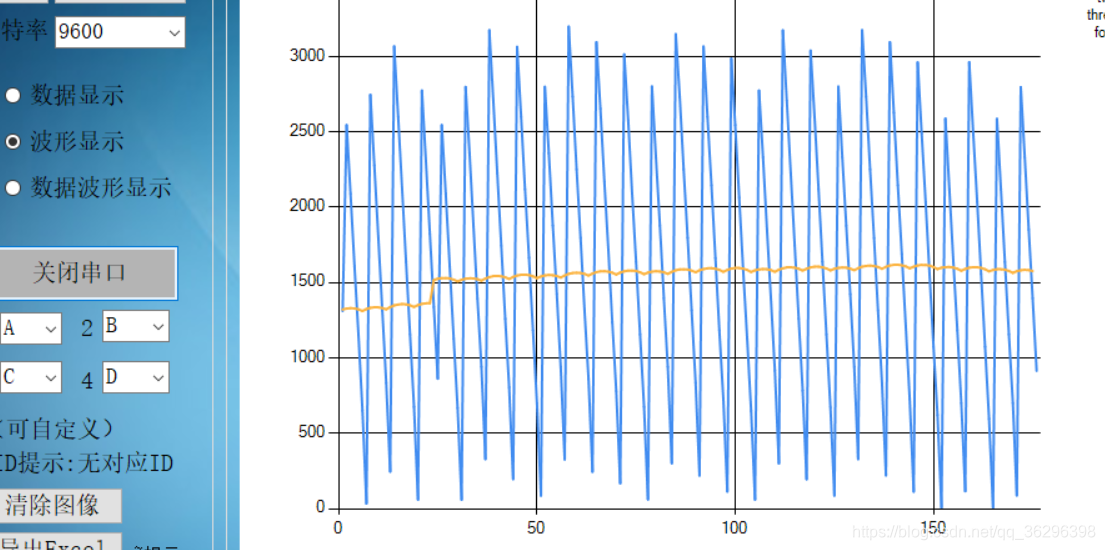
蓝色曲线为原始采样的数据曲线,橙色曲线为经过卡尔曼滤波后的曲线。
和第一次测试的波形图对比后可以发现,第二次经过卡尔曼滤波后的波形变化非常大,参数改变后锯齿波被滤成接近于直线了。
可以看到不同的R、Q值会对测量结果有很大的影响。
Q:过程噪声,Q增大,动态响应变快,收敛稳定性变坏
R:测量噪声,R增大,动态响应变慢,收敛稳定性变好
具体各个参数的如何选择,只有在应用中根据测量结果,自己慢慢调整。
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^