VINS-Mono运行时出现错误
1.我使用git clone下载了开源的代码
2.运行launch文件的时候没有出错,提示到no previous pose graph
3.当我使用rosbag play运行数据集的时候,,,,,第一条命令的终端(提示no previous pose graph的终端)就出现了图片中的错误,谢谢各位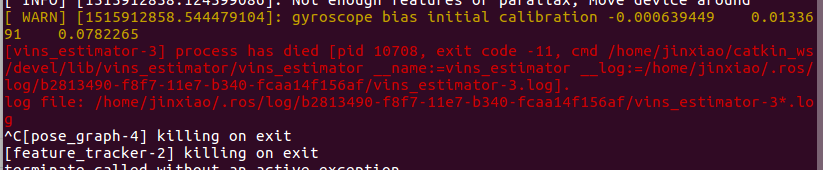
http://blog.csdn.net/snnily/article/details/72991139
你好,我看了这部分博文,对我帮助不是很大,我在谷歌上查到是因为eigen的版本问题,目前还在尝试,还未成功
要把配置文件里的load_previous_pose_graph设置为0,设置为1的话,会从你设置的路径首先加载之前保存的位姿图