智能驾驶,算法,路径规划求解~
求解图中关于智能驾驶方面的3个路径规划问题,这个问题是我学习的一套智能驾驶课程的课后习题,寻找有缘人,非常感谢
最短路径算法,最经典的有Dijkstra算法、Floyd算法等。
如果是使用matlab编程,可以应用shortestpath命令直接求最短路径,这是官方文档:
https://ww2.mathworks.cn/help/matlab/ref/graph.shortestpath.html
下面是参考的思路:
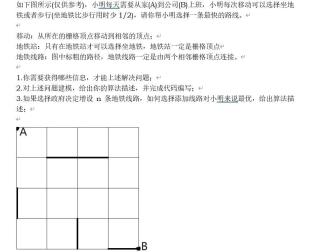
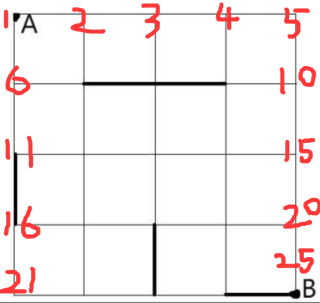
1.首先把你的图的顶点和边权重标注出来,问题就变成了求一个无向图(因为没有规定行进方向)中节点1到节点25的最短路径:
2.使用matlab编程求解,完整代码如下:
start_nodes = [1 1 2 2 3 3 4 4 5 6 6 7 7 8 8 9 9 10 11 11 12 12 13 13 14 14 15 16 16 17 17 18 18 19 19 20 21 22 23 24];
end_nodes = [2 6 3 7 4 8 5 9 10 7 11 8 12 9 13 10 14 15 12 16 13 17 14 18 15 19 20 17 21 18 22 19 23 20 24 25 22 23 24 25];
weights = [1 1 1 1 1 1 1 1 1 1 1 0.5 1 0.5 1 1 1 1 1 0.5 1 1 1 1 1 1 1 1 1 1 1 1 0.5 1 1 1 1 1 1 0.5];
G = graph(start_nodes,end_nodes,weights);
plot(G,'EdgeLabel',G.Edges.Weight)
[P,d] = shortestpath(G,1,25)
3.运行结果如下
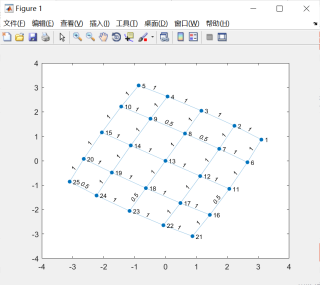
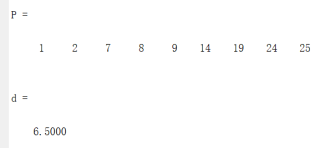
表示最短路径为1→2→7→8→9→14→19→24→25,最短距离为6.5
4.码字不易,有用望采纳
迪杰斯特拉算法
import heapq
MAX_N = 100 # 最大栅格节点数
class Edge:
def __init__(self, to, weight, is_subway):
self.to = to
self.weight = weight
self.is_subway = is_subway
def dijkstra(start, end, take_subway):
dist = [float('inf')] * MAX_N
dist[start] = 0
pq = [(0, start)]
while pq:
d, u = heapq.heappop(pq)
if d > dist[u]:
continue
for edge in graph[u]:
v = edge.to
weight = edge.weight
if take_subway and edge.is_subway:
weight /= 2
if dist[v] > dist[u] + weight:
dist[v] = dist[u] + weight
heapq.heappush(pq, (dist[v], v))
return dist[end]
if __name__ == "__main__":
# 假设我们已经构建好了城市栅格图,并且知道家(A)和公司(B)的位置
home = 0 # 假设家的节点编号为0
office = 10 # 假设公司的节点编号为10
# 假设我们知道哪些边是地铁线路
# 可以在构建图时设置Edge的is_subway属性
# 然后在dijkstra函数中进行相应的处理
# 步行的最短时间
walking_time = dijkstra(home, office, False)
# 乘坐地铁的最短时间
subway_time = dijkstra(home, office, True)
# 选择用时更短的选项
shortest_time = min(walking_time, subway_time)
print("最短时间为:{}分钟".format(shortest_time))
采用chatgpt:
为了解决小明的最快路线问题,我们需要获得以下信息:
1、地图信息:包含从家(A)到公司(B)的栅格地图,其中包括栅格顶点的位置和连接信息,以及地铁站的位置。
2、栅格顶点的邻接关系:确定哪些顶点是相邻的,即可从一个顶点移动到另一个相邻顶点的时间(步行和坐地铁时间)。
3、地铁线路信息:地铁线路的位置和连接信息,可以将其视为特殊的栅格顶点。
算法描述如下:
1、首先,将地图信息表示为一个栅格图的数据结构,并记录每个栅格顶点的位置和连接信息,以及地铁站的位置。
2、利用Dijkstra算法或A*算法进行路径搜索:
使用Dijkstra算法时,将从家(A)到公司(B)的路径看作图中的最短路径问题,其中边的权重表示从一个顶点移动到相邻顶点所需的时间(步行或坐地铁时间)。
使用A*算法时,同样将路径看作图中的搜索问题,需要定义启发式函数来指导搜索方向,可以选择预估从当前位置到目标位置的最小时间(步行或坐地铁时间)。
3、对于地铁线路的选择,可以采用贪心算法:
遍历所有可能的地铁线路,并将其加入到地图中。
使用之前的路径搜索算法寻找新的从家(A)到公司(B)的最短路径。
比较加入每条地铁线路后的最短路径,并选择对小明来说最优的线路。
以下是MATLAB代码示例:
% 假设地图信息如下,这里使用邻接矩阵表示栅格顶点之间的连接关系(1代表相邻,0代表不相邻)。
% 这里为了简化示例,仅给出一个简单的栅格地图,实际情况中可以根据具体地图进行设置。
map = [
0 1 0 1 0;
1 0 1 1 0;
0 1 0 1 1;
1 1 1 0 1;
0 0 1 1 0
];
% 地铁站位置,这里假设在第2和第24个栅格顶点有地铁站
subway_stations = [2, 24];
% 定义栅格顶点的位置坐标(这里为了简化,假设栅格大小为1,起点和终点分别在(1,1)和(5,5))
node_positions = [1, 1; 1, 2; 1, 3; 1, 4; 1, 5;
2, 1; 2, 2; 2, 3; 2, 4; 2, 5;
3, 1; 3, 2; 3, 3; 3, 4; 3, 5;
4, 1; 4, 2; 4, 3; 4, 4; 4, 5;
5, 1; 5, 2; 5, 3; 5, 4; 5, 5];
% 家(A)和公司(B)的位置(这里假设家在第1个栅格顶点,公司在第25个栅格顶点)
home = 1;
company = 25;
% 计算从家到公司的最快路线
path = a_star_algorithm(map, node_positions, home, company, subway_stations);
% 打印最快路线
if isempty(path)
disp('无法找到从家到公司的路径。');
else
disp('最快路线:');
disp(path);
end
% A*算法实现
function path = a_star_algorithm(map, node_positions, start, target, subway_stations)
num_nodes = size(map, 1);
open_list = start;
g_score = inf(1, num_nodes);
g_score(start) = 0;
f_score = h_estimate(node_positions, start, target);
came_from = zeros(1, num_nodes);
while ~isempty(open_list)
[~, current] = min(f_score(open_list));
current = open_list(current);
if current == target
path = reconstruct_path(came_from, target);
return;
end
open_list(open_list == current) = [];
for neighbor = 1:num_nodes
if map(current, neighbor) == 1
tentative_g_score = g_score(current) + calculate_cost(current, neighbor, subway_stations);
if tentative_g_score < g_score(neighbor)
g_score(neighbor) = tentative_g_score;
f_score(neighbor) = g_score(neighbor) + h_estimate(node_positions, neighbor, target);
came_from(neighbor) = current;
if ~ismember(neighbor, open_list)
open_list = [open_list, neighbor];
end
end
end
end
end
% 如果没有找到从起点到终点的路径,则返回一个空的路径数组
path = [];
end
% 启发式函数:计算从节点A到节点B的启发式估计距离(这里简单地使用曼哈顿距离)
function h = h_estimate(node_positions, nodeA, nodeB)
h = abs(node_positions(nodeA, 1) - node_positions(nodeB, 1)) + abs(node_positions(nodeA, 2) - node_positions(nodeB, 2));
end
% 计算从节点A到节点B的移动成本(考虑步行和坐地铁情况)
function cost = calculate_cost(nodeA, nodeB, subway_stations)
if ismember(nodeA, subway_stations) && ismember(nodeB, subway_stations)
cost = 0.5; % 坐地铁时间为步行时间的一半
else
cost = 1; % 步行时间
end
end
% 回溯得到最快路径
function path = reconstruct_path(came_from, target)
path = target;
current = target;
while came_from(current) ~= 0
path = [came_from(current), path];
current = came_from(current);
end
end
我们将使用A*算法来完成路径规划。A算法是一种启发式搜索算法,它通过估计当前节点到目标节点的最小距离来进行搜索。代码中,我们用曼哈顿距离作为启发式函数,考虑了步行和坐地铁的时间成本,以便找到从家到公司的最快路线。
最短路算法搜一下,然后有成品代码的,输入你的数据就行了
不知道你这个问题是否已经解决, 如果还没有解决的话:- 帮你找了个相似的问题, 你可以看下: https://ask.csdn.net/questions/7678452
- 这篇博客你也可以参考下:网络分块部署,最后图像矩阵拼接时中间有条缝隙,过渡不自然的问题解决方法
- 您还可以看一下 CSDN讲师老师的工业互联网来袭,开发者这样赢得先机!课程中的 英特尔助理工业智能化小节, 巩固相关知识点
- 除此之外, 这篇博客: 作为一名软件测试人员,有哪些网站是你应该多多关注的,哪些书籍是你必须要看的?中的 一、关注网站和阅读测试相关书籍,本质上都是为了提升自己,那么需要提升哪些方案呢? 部分也许能够解决你的问题。
- 以下回答由chatgpt基于相关博客总结生成:
问题回答
1. 在智能驾驶系统中,如何使用Python实现一个路径规划算法?
路径规划是智能驾驶系统中的核心问题之一。在Python中,有多种路径规划算法可以使用,例如A算法、Dijkstra算法、RRT算法等。下面是一个使用A算法进行路径规划的示例代码:
import heapq class Node: def __init__(self, position, g_cost, h_cost, parent): self.position = position self.g_cost = g_cost self.h_cost = h_cost self.parent = parent def f_cost(self): return self.g_cost + self.h_cost def distance(node1, node2): # 计算两个节点之间的曼哈顿距离 return abs(node1.position[0] - node2.position[0]) + abs(node1.position[1] - node2.position[1]) def find_path(start, end, grid): open_list = [] closed_list = set() heapq.heappush(open_list, (start.f_cost(), start)) while open_list: current = heapq.heappop(open_list)[1] if current.position == end.position: # 找到路径 path = [] node = current while node is not None: path.append(node.position) node = node.parent return path[::-1] closed_list.add(current.position) for neighbor in get_neighbors(current, grid): if neighbor.position in closed_list: continue g_cost = current.g_cost + distance(current, neighbor) h_cost = distance(neighbor, end) new_node = Node(neighbor.position, g_cost, h_cost, current) heapq.heappush(open_list, (new_node.f_cost(), new_node)) # 没有找到路径 return None def get_neighbors(node, grid): neighbors = [] directions = [(0, 1), (1, 0), (0, -1), (-1, 0)] # 上、右、下、左 for d in directions: new_position = (node.position[0] + d[0], node.position[1] + d[1]) if is_valid_position(new_position, grid): neighbors.append(Node(new_position, 0, 0, None)) return neighbors def is_valid_position(position, grid): return 0 <= position[0] < len(grid) and 0 <= position[1] < len(grid[0]) and grid[position[0]][position[1]] != 1 # 使用示例 grid = [ [0, 0, 0, 0, 0], [0, 1, 0, 1, 0], [0, 1, 0, 1, 0], [0, 0, 0, 0, 0], ] start = Node((0, 0), 0, distance(Node((0, 0), 0, 0, None), Node((4, 4), 0, 0, None)), None) end = Node((4, 4), 0, 0, None) path = find_path(start, end, grid) print(path)在这个示例中,我们使用了A算法来进行路径规划。首先定义了一个
Node类来表示节点,包括节点坐标、从起始点到当前节点的路径成本g_cost、从当前节点到终点的估计成本h_cost和父节点parent。然后定义了计算两个节点之间曼哈顿距离的函数distance。接下来是find_path函数,通过A算法搜索出起始点到终点的最优路径,并返回路径坐标的列表。最后是一个使用示例,其中grid是一个二维网格表示场景,0表示可以通过的道路,1表示障碍物。2. 如何解决智能驾驶中的避障问题,确保路径规划过程中不会发生碰撞?
在智能驾驶中,避障是一个非常重要的问题。为了确保路径规划过程中不会发生碰撞,可以采用以下策略:
在路径规划前进行障碍物检测:在路径规划之前,使用传感器(例如激光雷达、摄像头等)获取当前场景中的障碍物信息。根据障碍物的位置和大小,将其标记在地图上,或者将其作为可行驶区域的限制条件。
在路径规划算法中考虑障碍物:将障碍物的位置添加到路径规划算法中,使得算法在生成路径时能够避开障碍物。这可以通过在路径搜索过程中对障碍物进行剔除或添加限制条件来实现。例如,在A*算法中,我们可以修改
is_valid_position函数,在判断一个节点是否合法时考虑到障碍物的位置。动态避障:智能驾驶系统可能会遇到一些动态障碍物,例如行人、其他车辆等。为了避免与这些障碍物发生碰撞,可以使用实时传感器数据来进行动态避障。通过实时获取障碍物的位置和速度信息,并进行预测,可以在路径规划过程中避开这些障碍物。
3. 如何考虑交通流量和拥堵情况,以最优的方式规划智能驾驶车辆的路径?
考虑交通流量和拥堵情况是实现最优路径规划的一个关键问题。以下是一些实现最优路径规划的方法:
使用实时交通流量数据:通过获取实时的交通流量数据,可以根据道路的拥堵情况调整路径规划策略。可以使用传感器(例如交通摄像头、GPS等)获取实时的交通流量信息,将其作为路径规划算法的输入参数。基于实时数据,可以选择规划绕开拥堵道路或者选择密度较低的道路。
基于历史数据的预测:除了实时交通流量数据,还可以使用历史交通数据来预测未来的交通情况。通过分析历史数据中的交通模式和规律,可以预测某个时间段或者某个区域的交通流量和拥堵情况,并将其考虑到路径规划算法中。
考虑优先级和约束:除了交通流量和拥堵情况,还可以考虑其他因素来进行路径规划。例如,可以设置特定车辆的优先级,确保紧急车辆或公共交通工具的路径规划更加合理。同时,还可以考虑一些特殊的约束条件,如遵守交通规则、避免行驶在噪声敏感区域等。
实现最优路径规划需要综合考虑多种因素,并根据实际情况选择合适的方法或算法。路径规划算法可以根据具体需求进行调整和扩展,以实现更加智能和高效的智能驾驶系统。
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^
最短路算法