如何去保存和输入数据的

我输入的数据是以什么形式存放的?输入的数据存放在哪里?大家看见尽量回答一下问题里,c语言初学者
- 你可以看下这个问题的回答https://ask.csdn.net/questions/7633009
- 我还给你找了一篇非常好的博客,你可以看看是否有帮助,链接:你的c语言老师介绍过柔性数组吗?没有的话不妨进来看看吧~~
- 除此之外, 这篇博客: 使用C语言实现冒泡排序算法中的 冒泡排序属于交换排序的一种。所谓交换,就是根据序列中两个关键字的比较结果来确定这两个记录在序列中的位置。 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
冒泡排序的基本思想: 假设一个待排序列长度为n,从后往前(或从前往后)两两比较元素的值,若为正序则不操作,若为逆序(即A[i-1]>A[i])则交换它们,直到序列比较完,称为一趟“冒泡”,此时将最小的元素交换到待排序列的第一个位置,也是它的最终位置。下一趟排序时,上一趟确定的最小元素不再参与排序,每趟排序都将序列中最小的元素交换到第一个位置,依次类推,最多进行n-1趟冒泡就能把所有元素排好序。
排序完成的判断条件: 使用flag作为标志位,每趟冒泡前初始为false,若发生元素交换则置为true,在一趟冒泡完成后判断flag值,若为true则继续排序,若为false则说明没有发生元素交换,排序完成。
冒泡排序的性能分析:
空间复杂度:仅进行元素交换需要常数个辅助空间,因此空间复杂度为O(1)。
时间复杂度:当待排序列已经有序时,明显进行一趟冒泡后flag值为false,排序完成,直接结束,比较次数为n-1,移动次数为0;当待排序列逆序时,需要进行n-1趟冒泡,第i趟排序需要进行n-i次比较,每次比较必须移动元素3次以交换位置,在这种情况下,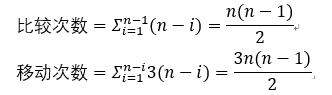
从而最坏情况下的时间复杂度为O(n2)。平均时间复杂度也为O(n2)。
举例说明冒泡过程:
设一个初始序列为A={10,6,9,3,5,2}
第一趟冒泡结果,A={2,10,6,9,3,5} (元素2到达最终位置)
第二趟冒泡结果,A={2,3,10,6,9,5} (元素3到达最终位置)
第三趟冒泡结果,A={2,3,5,10,6,9} (元素5到达最终位置)
第四趟冒泡结果,A={2,3,5,6,10,9} (元素6到达最终位置)
第五趟冒泡结果,A={2,3,5,6,9,10} (元素9到达最终位置)
此时排序完成
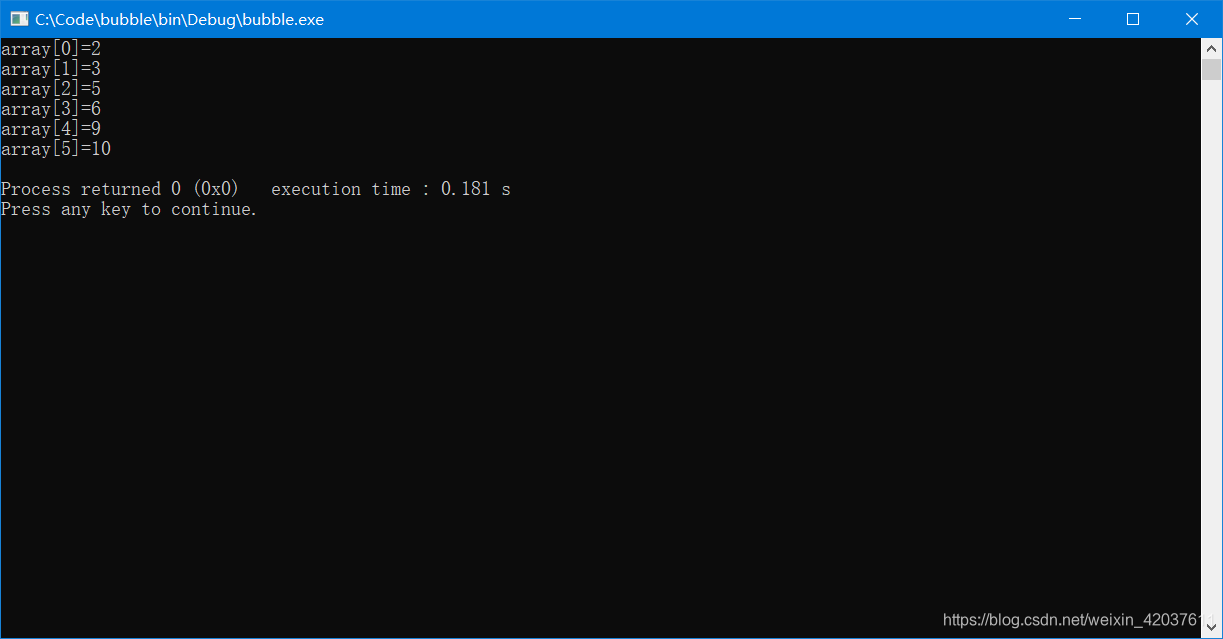
传统冒泡排序算法如下:#include <stdio.h> void bubblesort(int a[],int length); void swap(int a[],int i,int j); int main() { int array[6]={10,6,9,3,5,2}; /*定义一个数组*/ int i; bubblesort(array,6); for(i=0;i<6;i++) { printf("array[%d]=%d\n",i,array[i]); /*输出排序后的数组*/ } } void bubblesort(int a[],int n) /*冒泡排序算法*/ { if(n==0||n<2) /*序列长度小于2直接返回*/ return; int i,j,flag; for(i=0;i<n;i++) /*外层循环比较的次数*/ { flag=0; for(j=n-1;j>i;j--) /*内层循环比较的范围*/ { if(a[j-1]>a[j]) { swap(a,j-1,j); flag=1; } } if(flag==0) return; } } void swap(int a[],int i,int j) /*交换元素位置*/ { int temp; temp=a[i]; a[i]=a[j]; a[j]=temp; }运行结果如下图示:
- 您还可以看一下 李飞老师的C语言开发之数据结构与算法一课程中的 查找两个链表中第一个相同的节点小节, 巩固相关知识点
代码里输入的数据,以二进制的形式存放在计算机内存里。计算机内存分为:栈区、堆区、全局区(静态区)、文字常量区、程序代码区。代码里的数据存放在内存堆区。
1、栈区(stack)
由编译器自动分配释放 ,存放函数的参数值,局部变量的值等,内存的分配是连续的,类似于平时我们所说的栈,如果还不清楚,那么就把它想成数组,它的内存分配是连续分配的,即,所分配的内存是在一块连续的内存区域内.当我们声明变量时,那么编译器会自动接着当前栈区的结尾来分配内存.在WINDOWS下,栈的大小是2M(也有的说是1M,总之是一个编译时就确定的常数),如果申请的空间超过栈的剩余空间时,将提示overflow。因此,能从栈获得的空间较小。
2、堆区(heap)
一般由程序员分配释放, 若程序员不释放,程序结束时可能由操作系统回收.类似于链表,在内存中的分布不是连续的,它们是不同区域的内存块通过指针链接起来的.一旦某一节点从链中断开,我们要人为的把所断开的节点从内存中释放.堆是由程序员自己去申请开辟,不是连续的空间,由new/malloc分配的内存,并且指明大小,一般速度比较慢,而且容易产生内存碎片,不过用起来最方便.(new/malloc后一定要显示的调用free/delete去释放内存)
3、全局区(静态区)(static)
全局变量和静态变量的存储是放在一块的,初始化的全局变量和静态变量在一块区域, 未初始化的全局变量和未初始化的静态变量在相邻的另一块区域。 程序结束后由系统释放
4、文字常量区
常量字符串就是放在这里的。 程序结束后由系统释放
5、程序代码区
存放函数体的二进制代码。