rt-thread实现智能避障小车设计
如何实现呢?怎么用RTT来实现这个问题,请各位指点。现在遇到的是不会实现这个问题,然后有资料但无从下手。
回答整理来自ChatGpt,如果对你有帮助麻烦采纳一下,谢谢啦
确定需要实现的问题。在使用RTT之前,您需要明确要实现的问题,例如实时监控、数据采集、远程控制等。这有助于您选择适当的RTT组件和配置。
安装RTT组件。RTT通常由多个组件组成,包括内核模块、底层驱动、中间件和应用程序等。您需要根据您的硬件平台和操作系统选择适当的RTT组件,并按照官方文档中的步骤进行安装和配置。
编写应用程序。使用RTT提供的API和示例代码,编写您的应用程序。根据您的需求,您可能需要编写数据采集、实时监控、远程控制等不同类型的应用程序。
调试和测试。在编写和调试应用程序时,您需要使用适当的调试工具和技术,以确保应用程序的正确性和稳定性。您可以使用RTT提供的调试工具和示例代码,或者使用其他工具和技术进行调试和测试。
- 这篇文章:rtthread学习-防止优先级翻转 也许能够解决你的问题,你可以看下
- 除此之外, 这篇博客: 手把手教你移植RT-Thread系统中的 4.第四步 删除rtt中用不到的文件 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
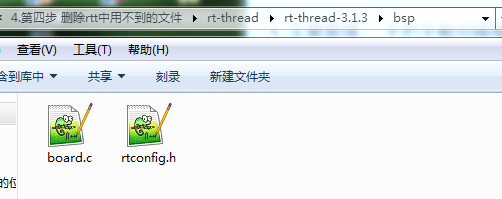
rt-thread-3.1.3 文件夹中的内容比较多,在项目中只需要用到其中一部分文件,为了使代码看起来更清爽,需要将不需要的文件删除掉。打开工程中rt-thread--->rt-thread-3.1.3--->bsp文件夹。

BSP文件夹中只留下board.c 和 rtconfig.h文件 其余全部删除。
删除rt-thread--->rt-thread-3.1.3--->docs文件夹


删除rtt中用不到的文件 rt-thread--->rt-thread-3.1.3--->libcpu--->arm,只留下工程中用到的cortex-m3文件夹,其余全部删除。


- 您还可以看一下 郭占鑫老师的16天入门物联网操作系统——RT-Thread课程中的 空闲线程及两个常用的钩子函数小节, 巩固相关知识点
- 以下回答由chatgpt基于相关博客总结生成:
答案:
为了使用RT-Thread实现智能避障小车设计,我们需要考虑以下几个方面:
- 硬件平台的选择和连接
根据实际需求选择合适的硬件平台,尤其是选择支持RT-Thread的微控制器芯片,比如STMicroelectronics或NXP Semiconductor等。之后将相关的控制器和传感器连接起来。
- RT-Thread的学习和使用
学习RT-Thread的基本概念、API函数和总体框架,可以参考上述相关参考资料中的文章目录和RT-Thread官方文档。使用RT-Thread搭建小车的操作系统,可以参考下面的步骤:
(1)下载并编译RT-Thread源码;
(2)选择并配置相应的微控制器芯片、板载器件和周边设备,生成底层驱动;
(3)配置内核和系统服务,同时按需求增加相应的任务、线程、消息队列和其他进程;
(4)在任务中编写相应的代码控制小车的运动和传感器的读取;
(5)编译、烧录运行。
- 小车设计与程序实现
在小车设计方面,我们需要考虑小车的驱动方式、物理结构和参数设置,同时需要安装相应的传感器,比如距离传感器和红外线传感器等,以便实现避障。在程序实现方面,我们需要考虑以下几个方面:
(1)利用GPIO控制小车的运动和方向,比如前进、后退、左转、右转等;
(2)读取距离传感器和红外线传感器等检测前方或侧方的障碍物,根据传感器的数值判断障碍物的距离、方向和类型;
(3)根据检测到的障碍物距离和类型,根据预设的避障策略,调整小车的转向或速度,以避免碰撞或其它危险行为。
以上是建议的一些步骤和方案,具体实现还需要结合实际情况和代码细节来进行调试和完善。如果您还有不明白的地方,可以多参考相关资料或RT-Thread官方论坛,或者向RT-Thread社区提问。