关于#python#的问题,如何解决?
在这段python代码中,当我测试功能8. 输出平均分大于80分的同学信息时,程序自动退出,请问如何修改?要求当有平均分大于80分的同学信息时,输出相关信息,没有大于80分时输出没有学生的平均分大于80分!。麻烦大家辛苦帮我看看
# 导入random库,用于生成验证码
import random
# 定义一个存储学生信息的列表
students = []
# 定义一个生成四位或五位验证码的函数
def generate_code():
code = ''
for i in range(5):
# 随机生成数字、小写字母和大写字母的组合
code += str(random.choice([random.randint(0, 9), chr(random.randint(65, 90)), chr(random.randint(97, 122))]))
return code
# 定义一个学生信息录入的函数
def add_student():
print('请输入学生信息:')
# 输入学生信息
student_id = input('学号:')
name = input('姓名:')
chinese_score = float(input('语文成绩:'))
math_score = float(input('数学成绩:'))
english_score = float(input('英语成绩:'))
# 将学生信息存储到字典中
student = {'id': student_id, 'name': name, 'chinese': chinese_score, 'math': math_score, 'english': english_score}
# 将学生信息添加到列表中
students.append(student)
print('学生信息录入成功!')
# 定义一个学生信息输出的函数
def show_students():
# 判断学生列表是否为空
if not students:
print('没有学生信息!')
else:
# 输出学生信息表头
print('学号\t姓名\t语文\t数学\t英语')
# 遍历学生列表,输出每个学生的信息
for student in students:
print('{}\t{}\t{}\t{}\t{}'.format(student['id'], student['name'], student['chinese'], student['math'], student['english']))
# 定义一个按学号查询学生信息的函数
def search_student():
# 输入要查询的学生学号
student_id = input('请输入要查询的学生学号:')
# 遍历学生列表,查找要查询的学生
for student in students:
if student['id'] == student_id:
# 输出学生信息
print('学号\t姓名\t语文\t数学\t英语')
print('{}\t{}\t{}\t{}\t{}'.format(student['id'], student['name'], student['chinese'], student['math'], student['english']))
return
# 如果没有找到要查询的学生,输出提示信息
print('没有找到该学生!')
# 定义一个按学号修改学生信息的函数
def modify_student():
# 输入要修改的学生学号
student_id = input('请输入要修改的学生学号:')
# 遍历学生列表,查找要修改的学生
for student in students:
if student['id'] == student_id:
# 输入要修改的学生信息
print('请输入修改后的学生信息:')
student['name'] = input('姓名:')
student['chinese'] = float(input('语文成绩:'))
student['math'] = float(input('数学成绩:'))
student['english'] = float(input('英语成绩:'))
# 输出修改后的学生信息
print('修改后的学生信息为:')
print('学号\t姓名\t语文\t数学\t英语')
print('{}\t{}\t{}\t{}\t{}'.format(student['id'], student['name'], student['chinese'], student['math'], student['english']))
return
# 如果没有找到要修改的学生,输出提示信息
print('没有找到该学生!')
# 定义一个求所有人平均成绩的函数
def calculate_average_score():
# 判断学生列表是否为空
if not students:
print('没有学生信息!')
else:
# 计算语文、数学、英语三门课程的平均成绩
chinese_sum = 0
math_sum = 0
english_sum = 0
for student in students:
chinese_sum += student['chinese']
math_sum += student['math']
english_sum += student['english']
chinese_average = chinese_sum / len(students)
math_average = math_sum / len(students)
english_average = english_sum / len(students)
# 输出平均成绩
print('平均成绩如下:')
print('语文:{}\n数学:{}\n英语:{}'.format(chinese_average, math_average, english_average))
# 定义一个删除某学生信息的函数
def delete_student():
# 输入要删除的学生学号
student_id = input('请输入要删除的学生学号:')
# 遍历学生列表,查找要删除的学生
for student in students:
if student['id'] == student_id:
# 删除学生信息
students.remove(student)
print('删除成功!')
return
# 如果没有找到要删除的学生,输出提示信息
print('没有找到该学生!')
# 定义一个添加某学生信息的函数
def insert_student():
# 输入要添加的学生信息
print('请输入添加的学生信息:')
student_id = input('学号:')
name = input('姓名:')
chinese_score = float(input('语文成绩:'))
math_score = float(input('数学成绩:'))
english_score = float(input('英语成绩:'))
# 将学生信息存储到字典中
student = {'id': student_id, 'name': name, 'chinese': chinese_score, 'math': math_score, 'english': english_score}
# 将学生信息添加到列表中
students.append(student)
print('添加成功!')
# 定义一个输出平均分大于80分的同学信息的函数
def show_good_students():
# 判断学生列表是否为空
if not students:
print('没有学生信息!')
else:
# 遍历学生列表,输出平均分大于80分的学生信息
print('学号\t姓名\t语文\t数学\t英语\t平均分')
good_students = []
for student in students:
average = (student['chinese'] + student['math'] + student['english']) / 3
if average > 80:
good_students.append(student)
print('{}\t{}\t{}\t{}\t{}\t{}'.format(student['id'], student['name'], student['chinese'], student['math'], student['english'], average))
# 判断是否有学生的平均分大于80分
if not any(student['平均分'] > 80 for student in students):
print('没有学生的平均分大于80分!'.rjust(44))
# 定义一个根据成绩排名的函数
def sort_students():
# 判断学生列表是否为空
if not students:
print('没有学生信息!')
else:
# 按平均分从高到低排序
students.sort(key=lambda x: (x['chinese']+x['math']+x['english'])/3, reverse=True)
# 输出排序后的学生信息
print('学号\t姓名\t语文\t数学\t英语\t平均分')
for student in students:
average = (student['chinese'] + student['math'] + student['english']) / 3
print('{}\t{}\t{}\t{}\t{}\t{}'.format(student['id'], student['name'], student['chinese'], student['math'], student['english'], average))
# 定义一个菜单函数
def show_menu():
print('学生成绩管理系统')
print('1. 学生信息录入')
print('2. 学生信息输出')
print('3. 按学号查询学生信息')
print('4. 按学号修改某学生信息')
print('5. 求所有人平均成绩')
print('6. 删除某学生信息')
print('7. 添加某学生信息')
print('8. 输出平均分大于80分的同学信息')
print('9. 根据成绩排名')
print('0. 退出系统')
choice = input('请输入您的选择:')
return choice
# 主函数
def main():
while True:
# 显示菜单
choice = show_menu()
if choice == '1':
add_student()
elif choice == '2':
show_students()
elif choice == '3':
search_student()
elif choice == '4':
modify_student()
elif choice == '5':
calculate_average_score()
elif choice == '6':
delete_student()
elif choice == '7':
insert_student()
elif choice == '8':
show_good_students()
elif choice == '9':
sort_students()
elif choice == '0':
print('谢谢使用!')
break
else:
print('输入错误,请重新输入!')
# 调用主函数
if __name__ == '__main__':
main()
判断是否有学生的平均分大于80换个别的判断:
if not good_students:
print(`没有学生的平均分大于80`)
这样试试
不知道你这个问题是否已经解决, 如果还没有解决的话:- 你可以参考下这个问题的回答, 看看是否对你有帮助, 链接: https://ask.csdn.net/questions/7451119
- 你也可以参考下这篇文章:一定要收藏,阿里P8大佬爆出python初学者一定要看的书(有实例分享)
- 除此之外, 这篇博客: Python实现替换照片人物背景,精细到头发丝(附上代码) | 机器学习中的 替换背景图代码 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
不废话了,上核心代码。
#!/usr/bin/env python # -*- coding: utf-8 -*- # @Time : 2021/11/14 21:24 # @Author : 剑客阿良_ALiang # @Site : # @File : inferance_hy.py import argparse import torch import os from torch.nn import functional as F from torch.utils.data import DataLoader from torchvision import transforms as T from torchvision.transforms.functional import to_pil_image from threading import Thread from tqdm import tqdm from torch.utils.data import Dataset from PIL import Image from typing import Callable, Optional, List, Tuple import glob from torch import nn from torchvision.models.resnet import ResNet, Bottleneck from torch import Tensor import torchvision import numpy as np import cv2 import uuid # --------------- hy --------------- class HomographicAlignment: """ Apply homographic alignment on background to match with the source image. """ def __init__(self): self.detector = cv2.ORB_create() self.matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE) def __call__(self, src, bgr): src = np.asarray(src) bgr = np.asarray(bgr) keypoints_src, descriptors_src = self.detector.detectAndCompute(src, None) keypoints_bgr, descriptors_bgr = self.detector.detectAndCompute(bgr, None) matches = self.matcher.match(descriptors_bgr, descriptors_src, None) matches.sort(key=lambda x: x.distance, reverse=False) num_good_matches = int(len(matches) * 0.15) matches = matches[:num_good_matches] points_src = np.zeros((len(matches), 2), dtype=np.float32) points_bgr = np.zeros((len(matches), 2), dtype=np.float32) for i, match in enumerate(matches): points_src[i, :] = keypoints_src[match.trainIdx].pt points_bgr[i, :] = keypoints_bgr[match.queryIdx].pt H, _ = cv2.findHomography(points_bgr, points_src, cv2.RANSAC) h, w = src.shape[:2] bgr = cv2.warpPerspective(bgr, H, (w, h)) msk = cv2.warpPerspective(np.ones((h, w)), H, (w, h)) # For areas that is outside of the background, # We just copy pixels from the source. bgr[msk != 1] = src[msk != 1] src = Image.fromarray(src) bgr = Image.fromarray(bgr) return src, bgr class Refiner(nn.Module): # For TorchScript export optimization. __constants__ = ['kernel_size', 'patch_crop_method', 'patch_replace_method'] def __init__(self, mode: str, sample_pixels: int, threshold: float, kernel_size: int = 3, prevent_oversampling: bool = True, patch_crop_method: str = 'unfold', patch_replace_method: str = 'scatter_nd'): super().__init__() assert mode in ['full', 'sampling', 'thresholding'] assert kernel_size in [1, 3] assert patch_crop_method in ['unfold', 'roi_align', 'gather'] assert patch_replace_method in ['scatter_nd', 'scatter_element'] self.mode = mode self.sample_pixels = sample_pixels self.threshold = threshold self.kernel_size = kernel_size self.prevent_oversampling = prevent_oversampling self.patch_crop_method = patch_crop_method self.patch_replace_method = patch_replace_method channels = [32, 24, 16, 12, 4] self.conv1 = nn.Conv2d(channels[0] + 6 + 4, channels[1], kernel_size, bias=False) self.bn1 = nn.BatchNorm2d(channels[1]) self.conv2 = nn.Conv2d(channels[1], channels[2], kernel_size, bias=False) self.bn2 = nn.BatchNorm2d(channels[2]) self.conv3 = nn.Conv2d(channels[2] + 6, channels[3], kernel_size, bias=False) self.bn3 = nn.BatchNorm2d(channels[3]) self.conv4 = nn.Conv2d(channels[3], channels[4], kernel_size, bias=True) self.relu = nn.ReLU(True) def forward(self, src: torch.Tensor, bgr: torch.Tensor, pha: torch.Tensor, fgr: torch.Tensor, err: torch.Tensor, hid: torch.Tensor): H_full, W_full = src.shape[2:] H_half, W_half = H_full // 2, W_full // 2 H_quat, W_quat = H_full // 4, W_full // 4 src_bgr = torch.cat([src, bgr], dim=1) if self.mode != 'full': err = F.interpolate(err, (H_quat, W_quat), mode='bilinear', align_corners=False) ref = self.select_refinement_regions(err) idx = torch.nonzero(ref.squeeze(1)) idx = idx[:, 0], idx[:, 1], idx[:, 2] if idx[0].size(0) > 0: x = torch.cat([hid, pha, fgr], dim=1) x = F.interpolate(x, (H_half, W_half), mode='bilinear', align_corners=False) x = self.crop_patch(x, idx, 2, 3 if self.kernel_size == 3 else 0) y = F.interpolate(src_bgr, (H_half, W_half), mode='bilinear', align_corners=False) y = self.crop_patch(y, idx, 2, 3 if self.kernel_size == 3 else 0) x = self.conv1(torch.cat([x, y], dim=1)) x = self.bn1(x) x = self.relu(x) x = self.conv2(x) x = self.bn2(x) x = self.relu(x) x = F.interpolate(x, 8 if self.kernel_size == 3 else 4, mode='nearest') y = self.crop_patch(src_bgr, idx, 4, 2 if self.kernel_size == 3 else 0) x = self.conv3(torch.cat([x, y], dim=1)) x = self.bn3(x) x = self.relu(x) x = self.conv4(x) out = torch.cat([pha, fgr], dim=1) out = F.interpolate(out, (H_full, W_full), mode='bilinear', align_corners=False) out = self.replace_patch(out, x, idx) pha = out[:, :1] fgr = out[:, 1:] else: pha = F.interpolate(pha, (H_full, W_full), mode='bilinear', align_corners=False) fgr = F.interpolate(fgr, (H_full, W_full), mode='bilinear', align_corners=False) else: x = torch.cat([hid, pha, fgr], dim=1) x = F.interpolate(x, (H_half, W_half), mode='bilinear', align_corners=False) y = F.interpolate(src_bgr, (H_half, W_half), mode='bilinear', align_corners=False) if self.kernel_size == 3: x = F.pad(x, (3, 3, 3, 3)) y = F.pad(y, (3, 3, 3, 3)) x = self.conv1(torch.cat([x, y], dim=1)) x = self.bn1(x) x = self.relu(x) x = self.conv2(x) x = self.bn2(x) x = self.relu(x) if self.kernel_size == 3: x = F.interpolate(x, (H_full + 4, W_full + 4)) y = F.pad(src_bgr, (2, 2, 2, 2)) else: x = F.interpolate(x, (H_full, W_full), mode='nearest') y = src_bgr x = self.conv3(torch.cat([x, y], dim=1)) x = self.bn3(x) x = self.relu(x) x = self.conv4(x) pha = x[:, :1] fgr = x[:, 1:] ref = torch.ones((src.size(0), 1, H_quat, W_quat), device=src.device, dtype=src.dtype) return pha, fgr, ref def select_refinement_regions(self, err: torch.Tensor): """ Select refinement regions. Input: err: error map (B, 1, H, W) Output: ref: refinement regions (B, 1, H, W). FloatTensor. 1 is selected, 0 is not. """ if self.mode == 'sampling': # Sampling mode. b, _, h, w = err.shape err = err.view(b, -1) idx = err.topk(self.sample_pixels // 16, dim=1, sorted=False).indices ref = torch.zeros_like(err) ref.scatter_(1, idx, 1.) if self.prevent_oversampling: ref.mul_(err.gt(0).float()) ref = ref.view(b, 1, h, w) else: # Thresholding mode. ref = err.gt(self.threshold).float() return ref def crop_patch(self, x: torch.Tensor, idx: Tuple[torch.Tensor, torch.Tensor, torch.Tensor], size: int, padding: int): """ Crops selected patches from image given indices. Inputs: x: image (B, C, H, W). idx: selection indices Tuple[(P,), (P,), (P,),], where the 3 values are (B, H, W) index. size: center size of the patch, also stride of the crop. padding: expansion size of the patch. Output: patch: (P, C, h, w), where h = w = size + 2 * padding. """ if padding != 0: x = F.pad(x, (padding,) * 4) if self.patch_crop_method == 'unfold': # Use unfold. Best performance for PyTorch and TorchScript. return x.permute(0, 2, 3, 1) \ .unfold(1, size + 2 * padding, size) \ .unfold(2, size + 2 * padding, size)[idx[0], idx[1], idx[2]] elif self.patch_crop_method == 'roi_align': # Use roi_align. Best compatibility for ONNX. idx = idx[0].type_as(x), idx[1].type_as(x), idx[2].type_as(x) b = idx[0] x1 = idx[2] * size - 0.5 y1 = idx[1] * size - 0.5 x2 = idx[2] * size + size + 2 * padding - 0.5 y2 = idx[1] * size + size + 2 * padding - 0.5 boxes = torch.stack([b, x1, y1, x2, y2], dim=1) return torchvision.ops.roi_align(x, boxes, size + 2 * padding, sampling_ratio=1) else: # Use gather. Crops out patches pixel by pixel. idx_pix = self.compute_pixel_indices(x, idx, size, padding) pat = torch.gather(x.view(-1), 0, idx_pix.view(-1)) pat = pat.view(-1, x.size(1), size + 2 * padding, size + 2 * padding) return pat def replace_patch(self, x: torch.Tensor, y: torch.Tensor, idx: Tuple[torch.Tensor, torch.Tensor, torch.Tensor]): """ Replaces patches back into image given index. Inputs: x: image (B, C, H, W) y: patches (P, C, h, w) idx: selection indices Tuple[(P,), (P,), (P,)] where the 3 values are (B, H, W) index. Output: image: (B, C, H, W), where patches at idx locations are replaced with y. """ xB, xC, xH, xW = x.shape yB, yC, yH, yW = y.shape if self.patch_replace_method == 'scatter_nd': # Use scatter_nd. Best performance for PyTorch and TorchScript. Replacing patch by patch. x = x.view(xB, xC, xH // yH, yH, xW // yW, yW).permute(0, 2, 4, 1, 3, 5) x[idx[0], idx[1], idx[2]] = y x = x.permute(0, 3, 1, 4, 2, 5).view(xB, xC, xH, xW) return x else: # Use scatter_element. Best compatibility for ONNX. Replacing pixel by pixel. idx_pix = self.compute_pixel_indices(x, idx, size=4, padding=0) return x.view(-1).scatter_(0, idx_pix.view(-1), y.view(-1)).view(x.shape) def compute_pixel_indices(self, x: torch.Tensor, idx: Tuple[torch.Tensor, torch.Tensor, torch.Tensor], size: int, padding: int): """ Compute selected pixel indices in the tensor. Used for crop_method == 'gather' and replace_method == 'scatter_element', which crop and replace pixel by pixel. Input: x: image: (B, C, H, W) idx: selection indices Tuple[(P,), (P,), (P,),], where the 3 values are (B, H, W) index. size: center size of the patch, also stride of the crop. padding: expansion size of the patch. Output: idx: (P, C, O, O) long tensor where O is the output size: size + 2 * padding, P is number of patches. the element are indices pointing to the input x.view(-1). """ B, C, H, W = x.shape S, P = size, padding O = S + 2 * P b, y, x = idx n = b.size(0) c = torch.arange(C) o = torch.arange(O) idx_pat = (c * H * W).view(C, 1, 1).expand([C, O, O]) + (o * W).view(1, O, 1).expand([C, O, O]) + o.view(1, 1, O).expand( [C, O, O]) idx_loc = b * W * H + y * W * S + x * S idx_pix = idx_loc.view(-1, 1, 1, 1).expand([n, C, O, O]) + idx_pat.view(1, C, O, O).expand([n, C, O, O]) return idx_pix def load_matched_state_dict(model, state_dict, print_stats=True): """ Only loads weights that matched in key and shape. Ignore other weights. """ num_matched, num_total = 0, 0 curr_state_dict = model.state_dict() for key in curr_state_dict.keys(): num_total += 1 if key in state_dict and curr_state_dict[key].shape == state_dict[key].shape: curr_state_dict[key] = state_dict[key] num_matched += 1 model.load_state_dict(curr_state_dict) if print_stats: print(f'Loaded state_dict: {num_matched}/{num_total} matched') def _make_divisible(v: float, divisor: int, min_value: Optional[int] = None) -> int: """ This function is taken from the original tf repo. It ensures that all layers have a channel number that is divisible by 8 It can be seen here: https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py """ if min_value is None: min_value = divisor new_v = max(min_value, int(v + divisor / 2) // divisor * divisor) # Make sure that round down does not go down by more than 10%. if new_v < 0.9 * v: new_v += divisor return new_v class ConvNormActivation(torch.nn.Sequential): def __init__( self, in_channels: int, out_channels: int, kernel_size: int = 3, stride: int = 1, padding: Optional[int] = None, groups: int = 1, norm_layer: Optional[Callable[..., torch.nn.Module]] = torch.nn.BatchNorm2d, activation_layer: Optional[Callable[..., torch.nn.Module]] = torch.nn.ReLU, dilation: int = 1, inplace: bool = True, ) -> None: if padding is None: padding = (kernel_size - 1) // 2 * dilation layers = [torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding, dilation=dilation, groups=groups, bias=norm_layer is None)] if norm_layer is not None: layers.append(norm_layer(out_channels)) if activation_layer is not None: layers.append(activation_layer(inplace=inplace)) super().__init__(*layers) self.out_channels = out_channels class InvertedResidual(nn.Module): def __init__( self, inp: int, oup: int, stride: int, expand_ratio: int, norm_layer: Optional[Callable[..., nn.Module]] = None ) -> None: super(InvertedResidual, self).__init__() self.stride = stride assert stride in [1, 2] if norm_layer is None: norm_layer = nn.BatchNorm2d hidden_dim = int(round(inp * expand_ratio)) self.use_res_connect = self.stride == 1 and inp == oup layers: List[nn.Module] = [] if expand_ratio != 1: # pw layers.append(ConvNormActivation(inp, hidden_dim, kernel_size=1, norm_layer=norm_layer, activation_layer=nn.ReLU6)) layers.extend([ # dw ConvNormActivation(hidden_dim, hidden_dim, stride=stride, groups=hidden_dim, norm_layer=norm_layer, activation_layer=nn.ReLU6), # pw-linear nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False), norm_layer(oup), ]) self.conv = nn.Sequential(*layers) self.out_channels = oup self._is_cn = stride > 1 def forward(self, x: Tensor) -> Tensor: if self.use_res_connect: return x + self.conv(x) else: return self.conv(x) class MobileNetV2(nn.Module): def __init__( self, num_classes: int = 1000, width_mult: float = 1.0, inverted_residual_setting: Optional[List[List[int]]] = None, round_nearest: int = 8, block: Optional[Callable[..., nn.Module]] = None, norm_layer: Optional[Callable[..., nn.Module]] = None ) -> None: """ MobileNet V2 main class Args: num_classes (int): Number of classes width_mult (float): Width multiplier - adjusts number of channels in each layer by this amount inverted_residual_setting: Network structure round_nearest (int): Round the number of channels in each layer to be a multiple of this number Set to 1 to turn off rounding block: Module specifying inverted residual building block for mobilenet norm_layer: Module specifying the normalization layer to use """ super(MobileNetV2, self).__init__() if block is None: block = InvertedResidual if norm_layer is None: norm_layer = nn.BatchNorm2d input_channel = 32 last_channel = 1280 if inverted_residual_setting is None: inverted_residual_setting = [ # t, c, n, s [1, 16, 1, 1], [6, 24, 2, 2], [6, 32, 3, 2], [6, 64, 4, 2], [6, 96, 3, 1], [6, 160, 3, 2], [6, 320, 1, 1], ] # only check the first element, assuming user knows t,c,n,s are required if len(inverted_residual_setting) == 0 or len(inverted_residual_setting[0]) != 4: raise ValueError("inverted_residual_setting should be non-empty " "or a 4-element list, got {}".format(inverted_residual_setting)) # building first layer input_channel = _make_divisible(input_channel * width_mult, round_nearest) self.last_channel = _make_divisible(last_channel * max(1.0, width_mult), round_nearest) features: List[nn.Module] = [ConvNormActivation(3, input_channel, stride=2, norm_layer=norm_layer, activation_layer=nn.ReLU6)] # building inverted residual blocks for t, c, n, s in inverted_residual_setting: output_channel = _make_divisible(c * width_mult, round_nearest) for i in range(n): stride = s if i == 0 else 1 features.append(block(input_channel, output_channel, stride, expand_ratio=t, norm_layer=norm_layer)) input_channel = output_channel # building last several layers features.append(ConvNormActivation(input_channel, self.last_channel, kernel_size=1, norm_layer=norm_layer, activation_layer=nn.ReLU6)) # make it nn.Sequential self.features = nn.Sequential(*features) # building classifier self.classifier = nn.Sequential( nn.Dropout(0.2), nn.Linear(self.last_channel, num_classes), ) # weight initialization for m in self.modules(): if isinstance(m, nn.Conv2d): nn.init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: nn.init.zeros_(m.bias) elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)): nn.init.ones_(m.weight) nn.init.zeros_(m.bias) elif isinstance(m, nn.Linear): nn.init.normal_(m.weight, 0, 0.01) nn.init.zeros_(m.bias) def _forward_impl(self, x: Tensor) -> Tensor: # This exists since TorchScript doesn't support inheritance, so the superclass method # (this one) needs to have a name other than `forward` that can be accessed in a subclass x = self.features(x) # Cannot use "squeeze" as batch-size can be 1 x = nn.functional.adaptive_avg_pool2d(x, (1, 1)) x = torch.flatten(x, 1) x = self.classifier(x) return x def forward(self, x: Tensor) -> Tensor: return self._forward_impl(x) class MobileNetV2Encoder(MobileNetV2): """ MobileNetV2Encoder inherits from torchvision's official MobileNetV2. It is modified to use dilation on the last block to maintain output stride 16, and deleted the classifier block that was originally used for classification. The forward method additionally returns the feature maps at all resolutions for decoder's use. """ def __init__(self, in_channels, norm_layer=None): super().__init__() # Replace first conv layer if in_channels doesn't match. if in_channels != 3: self.features[0][0] = nn.Conv2d(in_channels, 32, 3, 2, 1, bias=False) # Remove last block self.features = self.features[:-1] # Change to use dilation to maintain output stride = 16 self.features[14].conv[1][0].stride = (1, 1) for feature in self.features[15:]: feature.conv[1][0].dilation = (2, 2) feature.conv[1][0].padding = (2, 2) # Delete classifier del self.classifier def forward(self, x): x0 = x # 1/1 x = self.features[0](x) x = self.features[1](x) x1 = x # 1/2 x = self.features[2](x) x = self.features[3](x) x2 = x # 1/4 x = self.features[4](x) x = self.features[5](x) x = self.features[6](x) x3 = x # 1/8 x = self.features[7](x) x = self.features[8](x) x = self.features[9](x) x = self.features[10](x) x = self.features[11](x) x = self.features[12](x) x = self.features[13](x) x = self.features[14](x) x = self.features[15](x) x = self.features[16](x) x = self.features[17](x) x4 = x # 1/16 return x4, x3, x2, x1, x0 class Decoder(nn.Module): def __init__(self, channels, feature_channels): super().__init__() self.conv1 = nn.Conv2d(feature_channels[0] + channels[0], channels[1], 3, padding=1, bias=False) self.bn1 = nn.BatchNorm2d(channels[1]) self.conv2 = nn.Conv2d(feature_channels[1] + channels[1], channels[2], 3, padding=1, bias=False) self.bn2 = nn.BatchNorm2d(channels[2]) self.conv3 = nn.Conv2d(feature_channels[2] + channels[2], channels[3], 3, padding=1, bias=False) self.bn3 = nn.BatchNorm2d(channels[3]) self.conv4 = nn.Conv2d(feature_channels[3] + channels[3], channels[4], 3, padding=1) self.relu = nn.ReLU(True) def forward(self, x4, x3, x2, x1, x0): x = F.interpolate(x4, size=x3.shape[2:], mode='bilinear', align_corners=False) x = torch.cat([x, x3], dim=1) x = self.conv1(x) x = self.bn1(x) x = self.relu(x) x = F.interpolate(x, size=x2.shape[2:], mode='bilinear', align_corners=False) x = torch.cat([x, x2], dim=1) x = self.conv2(x) x = self.bn2(x) x = self.relu(x) x = F.interpolate(x, size=x1.shape[2:], mode='bilinear', align_corners=False) x = torch.cat([x, x1], dim=1) x = self.conv3(x) x = self.bn3(x) x = self.relu(x) x = F.interpolate(x, size=x0.shape[2:], mode='bilinear', align_corners=False) x = torch.cat([x, x0], dim=1) x = self.conv4(x) return x class ASPPPooling(nn.Sequential): def __init__(self, in_channels: int, out_channels: int) -> None: super(ASPPPooling, self).__init__( nn.AdaptiveAvgPool2d(1), nn.Conv2d(in_channels, out_channels, 1, bias=False), nn.BatchNorm2d(out_channels), nn.ReLU()) def forward(self, x: torch.Tensor) -> torch.Tensor: size = x.shape[-2:] for mod in self: x = mod(x) return F.interpolate(x, size=size, mode='bilinear', align_corners=False) class ASPPConv(nn.Sequential): def __init__(self, in_channels: int, out_channels: int, dilation: int) -> None: modules = [ nn.Conv2d(in_channels, out_channels, 3, padding=dilation, dilation=dilation, bias=False), nn.BatchNorm2d(out_channels), nn.ReLU() ] super(ASPPConv, self).__init__(*modules) class ASPP(nn.Module): def __init__(self, in_channels: int, atrous_rates: List[int], out_channels: int = 256) -> None: super(ASPP, self).__init__() modules = [] modules.append(nn.Sequential( nn.Conv2d(in_channels, out_channels, 1, bias=False), nn.BatchNorm2d(out_channels), nn.ReLU())) rates = tuple(atrous_rates) for rate in rates: modules.append(ASPPConv(in_channels, out_channels, rate)) modules.append(ASPPPooling(in_channels, out_channels)) self.convs = nn.ModuleList(modules) self.project = nn.Sequential( nn.Conv2d(len(self.convs) * out_channels, out_channels, 1, bias=False), nn.BatchNorm2d(out_channels), nn.ReLU(), nn.Dropout(0.5)) def forward(self, x: torch.Tensor) -> torch.Tensor: _res = [] for conv in self.convs: _res.append(conv(x)) res = torch.cat(_res, dim=1) return self.project(res) class ResNetEncoder(ResNet): layers = { 'resnet50': [3, 4, 6, 3], 'resnet101': [3, 4, 23, 3], } def __init__(self, in_channels, variant='resnet101', norm_layer=None): super().__init__( block=Bottleneck, layers=self.layers[variant], replace_stride_with_dilation=[False, False, True], norm_layer=norm_layer) # Replace first conv layer if in_channels doesn't match. if in_channels != 3: self.conv1 = nn.Conv2d(in_channels, 64, 7, 2, 3, bias=False) # Delete fully-connected layer del self.avgpool del self.fc def forward(self, x): x0 = x # 1/1 x = self.conv1(x) x = self.bn1(x) x = self.relu(x) x1 = x # 1/2 x = self.maxpool(x) x = self.layer1(x) x2 = x # 1/4 x = self.layer2(x) x3 = x # 1/8 x = self.layer3(x) x = self.layer4(x) x4 = x # 1/16 return x4, x3, x2, x1, x0 class Base(nn.Module): """ A generic implementation of the base encoder-decoder network inspired by DeepLab. Accepts arbitrary channels for input and output. """ def __init__(self, backbone: str, in_channels: int, out_channels: int): super().__init__() assert backbone in ["resnet50", "resnet101", "mobilenetv2"] if backbone in ['resnet50', 'resnet101']: self.backbone = ResNetEncoder(in_channels, variant=backbone) self.aspp = ASPP(2048, [3, 6, 9]) self.decoder = Decoder([256, 128, 64, 48, out_channels], [512, 256, 64, in_channels]) else: self.backbone = MobileNetV2Encoder(in_channels) self.aspp = ASPP(320, [3, 6, 9]) self.decoder = Decoder([256, 128, 64, 48, out_channels], [32, 24, 16, in_channels]) def forward(self, x): x, *shortcuts = self.backbone(x) x = self.aspp(x) x = self.decoder(x, *shortcuts) return x def load_pretrained_deeplabv3_state_dict(self, state_dict, print_stats=True): # Pretrained DeepLabV3 models are provided by <https://github.com/VainF/DeepLabV3Plus-Pytorch>. # This method converts and loads their pretrained state_dict to match with our model structure. # This method is not needed if you are not planning to train from deeplab weights. # Use load_state_dict() for normal weight loading. # Convert state_dict naming for aspp module state_dict = {k.replace('classifier.classifier.0', 'aspp'): v for k, v in state_dict.items()} if isinstance(self.backbone, ResNetEncoder): # ResNet backbone does not need change. load_matched_state_dict(self, state_dict, print_stats) else: # Change MobileNetV2 backbone to state_dict format, then change back after loading. backbone_features = self.backbone.features self.backbone.low_level_features = backbone_features[:4] self.backbone.high_level_features = backbone_features[4:] del self.backbone.features load_matched_state_dict(self, state_dict, print_stats) self.backbone.features = backbone_features del self.backbone.low_level_features del self.backbone.high_level_features class MattingBase(Base): def __init__(self, backbone: str): super().__init__(backbone, in_channels=6, out_channels=(1 + 3 + 1 + 32)) def forward(self, src, bgr): x = torch.cat([src, bgr], dim=1) x, *shortcuts = self.backbone(x) x = self.aspp(x) x = self.decoder(x, *shortcuts) pha = x[:, 0:1].clamp_(0., 1.) fgr = x[:, 1:4].add(src).clamp_(0., 1.) err = x[:, 4:5].clamp_(0., 1.) hid = x[:, 5:].relu_() return pha, fgr, err, hid class MattingRefine(MattingBase): def __init__(self, backbone: str, backbone_scale: float = 1 / 4, refine_mode: str = 'sampling', refine_sample_pixels: int = 80_000, refine_threshold: float = 0.1, refine_kernel_size: int = 3, refine_prevent_oversampling: bool = True, refine_patch_crop_method: str = 'unfold', refine_patch_replace_method: str = 'scatter_nd'): assert backbone_scale <= 1 / 2, 'backbone_scale should not be greater than 1/2' super().__init__(backbone) self.backbone_scale = backbone_scale self.refiner = Refiner(refine_mode, refine_sample_pixels, refine_threshold, refine_kernel_size, refine_prevent_oversampling, refine_patch_crop_method, refine_patch_replace_method) def forward(self, src, bgr): assert src.size() == bgr.size(), 'src and bgr must have the same shape' assert src.size(2) // 4 * 4 == src.size(2) and src.size(3) // 4 * 4 == src.size(3), \ 'src and bgr must have width and height that are divisible by 4' # Downsample src and bgr for backbone src_sm = F.interpolate(src, scale_factor=self.backbone_scale, mode='bilinear', align_corners=False, recompute_scale_factor=True) bgr_sm = F.interpolate(bgr, scale_factor=self.backbone_scale, mode='bilinear', align_corners=False, recompute_scale_factor=True) # Base x = torch.cat([src_sm, bgr_sm], dim=1) x, *shortcuts = self.backbone(x) x = self.aspp(x) x = self.decoder(x, *shortcuts) pha_sm = x[:, 0:1].clamp_(0., 1.) fgr_sm = x[:, 1:4] err_sm = x[:, 4:5].clamp_(0., 1.) hid_sm = x[:, 5:].relu_() # Refiner pha, fgr, ref_sm = self.refiner(src, bgr, pha_sm, fgr_sm, err_sm, hid_sm) # Clamp outputs pha = pha.clamp_(0., 1.) fgr = fgr.add_(src).clamp_(0., 1.) fgr_sm = src_sm.add_(fgr_sm).clamp_(0., 1.) return pha, fgr, pha_sm, fgr_sm, err_sm, ref_sm class ImagesDataset(Dataset): def __init__(self, root, mode='RGB', transforms=None): self.transforms = transforms self.mode = mode self.filenames = sorted([*glob.glob(os.path.join(root, '**', '*.jpg'), recursive=True), *glob.glob(os.path.join(root, '**', '*.png'), recursive=True)]) def __len__(self): return len(self.filenames) def __getitem__(self, idx): with Image.open(self.filenames[idx]) as img: img = img.convert(self.mode) if self.transforms: img = self.transforms(img) return img class NewImagesDataset(Dataset): def __init__(self, root, mode='RGB', transforms=None): self.transforms = transforms self.mode = mode self.filenames = [root] print(self.filenames) def __len__(self): return len(self.filenames) def __getitem__(self, idx): with Image.open(self.filenames[idx]) as img: img = img.convert(self.mode) if self.transforms: img = self.transforms(img) return img class ZipDataset(Dataset): def __init__(self, datasets: List[Dataset], transforms=None, assert_equal_length=False): self.datasets = datasets self.transforms = transforms if assert_equal_length: for i in range(1, len(datasets)): assert len(datasets[i]) == len(datasets[i - 1]), 'Datasets are not equal in length.' def __len__(self): return max(len(d) for d in self.datasets) def __getitem__(self, idx): x = tuple(d[idx % len(d)] for d in self.datasets) print(x) if self.transforms: x = self.transforms(*x) return x class PairCompose(T.Compose): def __call__(self, *x): for transform in self.transforms: x = transform(*x) return x class PairApply: def __init__(self, transforms): self.transforms = transforms def __call__(self, *x): return [self.transforms(xi) for xi in x] # --------------- Arguments --------------- parser = argparse.ArgumentParser(description='hy-replace-background') parser.add_argument('--model-type', type=str, required=False, choices=['mattingbase', 'mattingrefine'], default='mattingrefine') parser.add_argument('--model-backbone', type=str, required=False, choices=['resnet101', 'resnet50', 'mobilenetv2'], default='resnet50') parser.add_argument('--model-backbone-scale', type=float, default=0.25) parser.add_argument('--model-checkpoint', type=str, required=False, default='model/pytorch_resnet50.pth') parser.add_argument('--model-refine-mode', type=str, default='sampling', choices=['full', 'sampling', 'thresholding']) parser.add_argument('--model-refine-sample-pixels', type=int, default=80_000) parser.add_argument('--model-refine-threshold', type=float, default=0.7) parser.add_argument('--model-refine-kernel-size', type=int, default=3) parser.add_argument('--device', type=str, choices=['cpu', 'cuda'], default='cuda') parser.add_argument('--num-workers', type=int, default=0, help='number of worker threads used in DataLoader. Note that Windows need to use single thread (0).') parser.add_argument('--preprocess-alignment', action='store_true') parser.add_argument('--output-dir', type=str, required=False, default='content/output') parser.add_argument('--output-types', type=str, required=False, nargs='+', choices=['com', 'pha', 'fgr', 'err', 'ref', 'new'], default=['new']) parser.add_argument('-y', action='store_true') def handle(image_path: str, bgr_path: str, new_bg: str): parser.add_argument('--images-src', type=str, required=False, default=image_path) parser.add_argument('--images-bgr', type=str, required=False, default=bgr_path) args = parser.parse_args() assert 'err' not in args.output_types or args.model_type in ['mattingbase', 'mattingrefine'], \ 'Only mattingbase and mattingrefine support err output' assert 'ref' not in args.output_types or args.model_type in ['mattingrefine'], \ 'Only mattingrefine support ref output' # --------------- Main --------------- device = torch.device(args.device) # Load model if args.model_type == 'mattingbase': model = MattingBase(args.model_backbone) if args.model_type == 'mattingrefine': model = MattingRefine( args.model_backbone, args.model_backbone_scale, args.model_refine_mode, args.model_refine_sample_pixels, args.model_refine_threshold, args.model_refine_kernel_size) model = model.to(device).eval() model.load_state_dict(torch.load(args.model_checkpoint, map_location=device), strict=False) # Load images dataset = ZipDataset([ NewImagesDataset(args.images_src), NewImagesDataset(args.images_bgr), ], assert_equal_length=True, transforms=PairCompose([ HomographicAlignment() if args.preprocess_alignment else PairApply(nn.Identity()), PairApply(T.ToTensor()) ])) dataloader = DataLoader(dataset, batch_size=1, num_workers=args.num_workers, pin_memory=True) # # Create output directory # if os.path.exists(args.output_dir): # if args.y or input(f'Directory {args.output_dir} already exists. Override? [Y/N]: ').lower() == 'y': # shutil.rmtree(args.output_dir) # else: # exit() for output_type in args.output_types: if os.path.exists(os.path.join(args.output_dir, output_type)) is False: os.makedirs(os.path.join(args.output_dir, output_type)) # Worker function def writer(img, path): img = to_pil_image(img[0].cpu()) img.save(path) # Worker function def writer_hy(img, new_bg, path): img = to_pil_image(img[0].cpu()) img_size = img.size new_bg_img = Image.open(new_bg).convert('RGBA') new_bg_img.resize(img_size, Image.ANTIALIAS) out = Image.alpha_composite(new_bg_img, img) out.save(path) result_file_name = str(uuid.uuid4()) # Conversion loop with torch.no_grad(): for i, (src, bgr) in enumerate(tqdm(dataloader)): src = src.to(device, non_blocking=True) bgr = bgr.to(device, non_blocking=True) if args.model_type == 'mattingbase': pha, fgr, err, _ = model(src, bgr) elif args.model_type == 'mattingrefine': pha, fgr, _, _, err, ref = model(src, bgr) pathname = dataset.datasets[0].filenames[i] pathname = os.path.relpath(pathname, args.images_src) pathname = os.path.splitext(pathname)[0] if 'new' in args.output_types: new = torch.cat([fgr * pha.ne(0), pha], dim=1) Thread(target=writer_hy, args=(new, new_bg, os.path.join(args.output_dir, 'new', result_file_name + '.png'))).start() if 'com' in args.output_types: com = torch.cat([fgr * pha.ne(0), pha], dim=1) Thread(target=writer, args=(com, os.path.join(args.output_dir, 'com', pathname + '.png'))).start() if 'pha' in args.output_types: Thread(target=writer, args=(pha, os.path.join(args.output_dir, 'pha', pathname + '.jpg'))).start() if 'fgr' in args.output_types: Thread(target=writer, args=(fgr, os.path.join(args.output_dir, 'fgr', pathname + '.jpg'))).start() if 'err' in args.output_types: err = F.interpolate(err, src.shape[2:], mode='bilinear', align_corners=False) Thread(target=writer, args=(err, os.path.join(args.output_dir, 'err', pathname + '.jpg'))).start() if 'ref' in args.output_types: ref = F.interpolate(ref, src.shape[2:], mode='nearest') Thread(target=writer, args=(ref, os.path.join(args.output_dir, 'ref', pathname + '.jpg'))).start() return os.path.join(args.output_dir, 'new', result_file_name + '.png') if __name__ == '__main__': handle("data/img2.png", "data/bg.png", "data/newbg.jpg")代码说明
1、handle方法的参数一次为:原始图路径、原始背景图路径、新背景图路径。
1、我将原项目中inferance_images使用的类都移到一个文件中,精简一下项目结构。
2、ImagesDateSet我重新构造了一个新的NewImagesDateSet,,主要是因为我只打算处理一张图片。
3、最终图片都存在相同目录下,避免重复使用uuid作为文件名。
4、本文给出的代码没有对文件格式做严格校正,不是很关键,如果需要补充就行。
验证一下效果
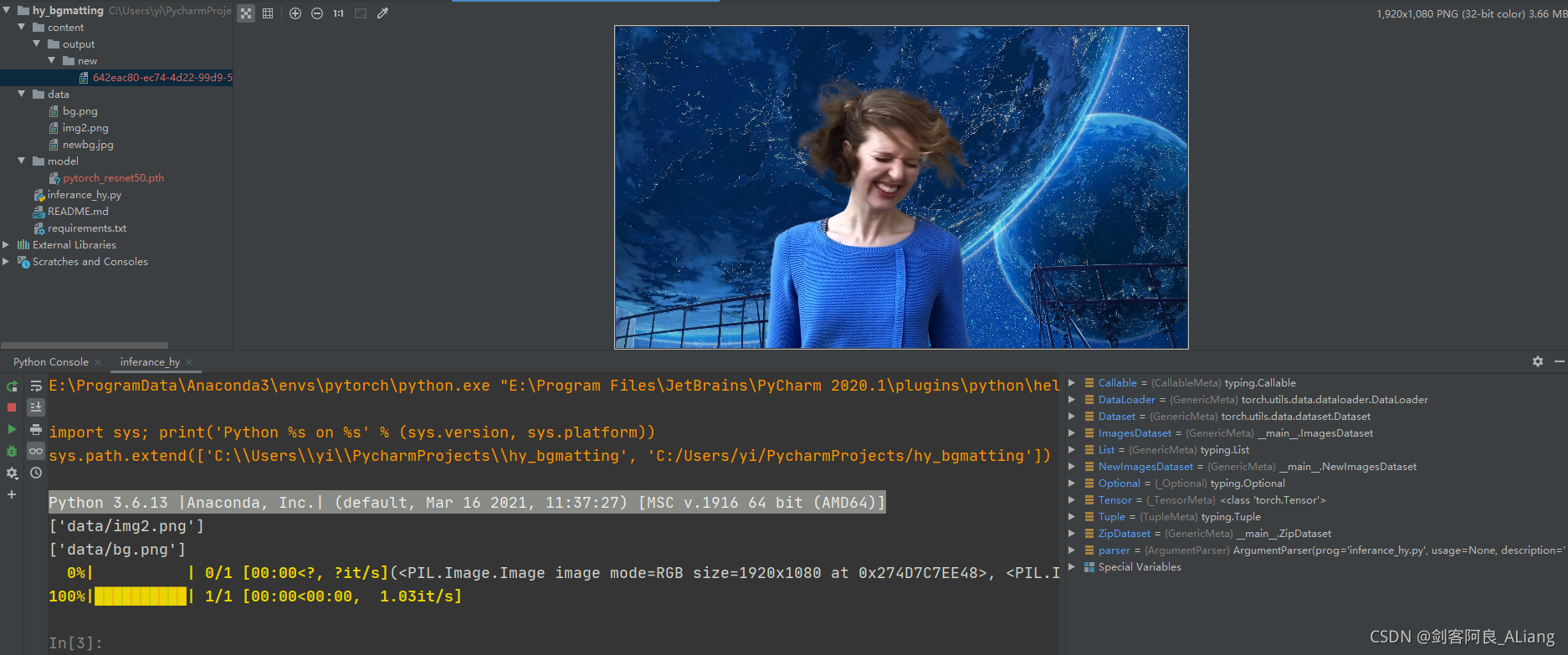
怎么样?还是很炫吧!
- 您还可以看一下 CSDN就业班老师的Python全栈工程师特训班第十四期-直播回放课程中的 Python全栈工程师特训班第十四期-第十二周-爬虫第三周-03小节, 巩固相关知识点
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^