keil安装STM的问题

在本安装了C51后想加个stm,双击stm安装包后出现这个情况!请求支援!
h记事本打开下面的 tools.ini,看看里面 rtepath 怎么设置的。
- 这篇博客: 【毕业设计】基于超声波智能跟随小车 - 单片机 物联网 stm32 c51中的 4.3 方案三: 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
在小车上布置安装两个超声波接收装置, 组装一个人手持的超声波发射装置。 小车通过超声波接收装置接收到超声波后计算得出实时的距离。 如果人手持着超声波发射装置转向后, 安装在小车两侧的两个接收装置的到信号会产生不同。 通过对于超声波发射装置和两个超声波接收装置的距离不同, 获取小车应该向哪个方向转向的信息。 通过单片机的计算和控制, 从而实现小车对于人手持的设备跟随的目的。
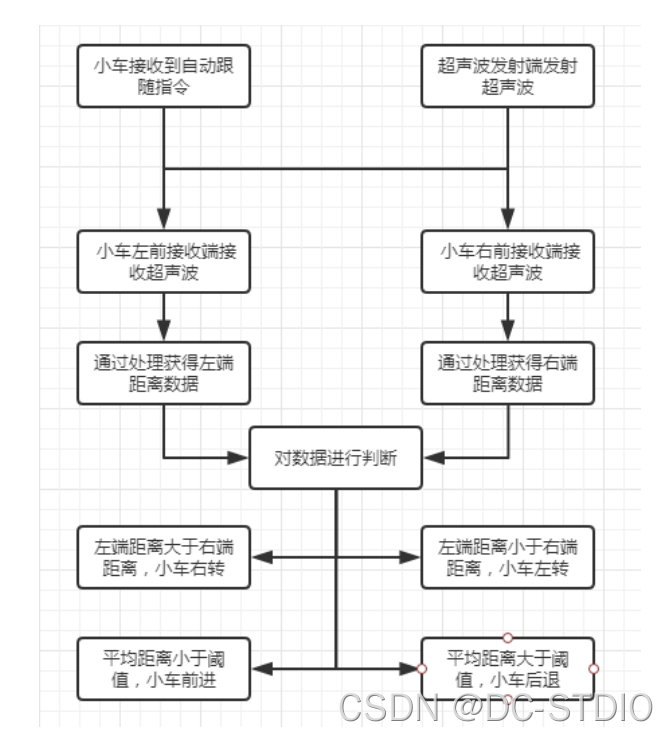
从理论的角度上来说, 以上 3 个方案都是可以实现的。 但是由于本人能力有限, 只实现了第三个方案的内容。 如图 3.3 所示为小车超声波自动跟随的流程图。 小车通过蓝牙串口接收到自动跟随的指令。 打开超声波发射端电源, 超声波发射端持续发射超声波。小车车前方的 2 个超声波接收端持续接收超声波, 将接收到的超声波数据经过一定的处理后可以转换为距离信息。 通过对左右两端的距离信息进行比较, 可以判断出小车需要进行的动作。 当小车左端接收到的距离数据大于小车右端接收到的距离数据时, 可以判断出超声波的发射位置在小车的偏右侧, 所以小车应该向右转向直到小车两接收端接收到的距离数据相等。 当小车左端接收到的距离数据小于小车右端接收到的距离数据时,可以判断出超声波的发射位置在小车的偏左侧, 所以小车应该向左转向直到小车两接收端接收到的距离数据相等。 当小车两接收端接收到的数据相等时, 通过比较距离数据与预先设定的跟随阈值的大小, 判断小车应该前进还是后退。
最终设计流程如下