把这段matlab代码改成c语言的函数。
function [angle_theta1,angle_theta2,angle_theta3] = inver(px,py,pz) %11,0,0为零点
syms theta1 theta2 theta3 l a1 a2 a3
pi = 3.1415926;
a1 = 4.9;
a2 = 6.5;
a3 = 15.5;
l = 12.8;
theta1 = atan2(py,px);
theta2 = -2*atan((((8*(a2^2*a3*l - a2^2*a3*pz))/((a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)*(a1^2 - 2*a1*a2 - 2*a1*px + a2^2 + 2*a2*px - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)) - (4*a2*a3*((- a1^2 + 2*a1*px + a2^2 + 2*a2*a3 + a3^2 - l^2 + 2*l*pz - px^2 - pz^2)*(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2))^(1/2))/((a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)*(a1^2 - 2*a1*a2 - 2*a1*px + a2^2 + 2*a2*px - a3^2 + l^2 - 2*l*pz + px^2 + pz^2)))*(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2))/(4*a2*a3));
theta3 = -2*atan(((- a1^2 + 2*a1*px + a2^2 + 2*a2*a3 + a3^2 - l^2 + 2*l*pz - px^2 - pz^2)*(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2))^(1/2)/(a1^2 - 2*a1*px - a2^2 + 2*a2*a3 - a3^2 + l^2 - 2*l*pz + px^2 + pz^2));
angle_theta1 = theta1/pi*180;
angle_theta2 = theta2/pi*180;
angle_theta3 = theta3/pi*180;
end
最后的代码是matlab上的运行成果,转换成c语言后算出来的角度angle_theta也需要一致,需要验证答案正确性。
把这段matlab代码改成c语言的函数。
这段matlab代码是计算逆运动学三个角度的,由于其中的^2平方形式无法用在c语言上,所以需要转换成pow的方式,比较难。其实只要将所有的^2平方格式的转化成pow格式即可。函数的解释是:输入三个参数px py pz,为尖端的三个坐标,然后利用这三个坐标计算theta123,然后弧度制转角度制,输出。
记得先验证答案正确再回答,感谢大家!
根据要求,编写了以下示例代码
#include<stdlib.h>
#include<stdio.h>
#include <math.h>
float pi = 3.1415926;
float a1 = 4.9;
float a2 = 6.5;
float a3 = 15.5;
float l = 12.8;
float theta1=0;
float theta2=0;
float theta3=0;
float angle_theta1=0;
float angle_theta2=0;
float angle_theta3=0;
float x[3]={0,0,0};
void Inver(float px,float py,float pz,float *angle)
{
theta1 = atan2(py,px);
theta2 = -2*atan((((8*(a2*a2*a3*l - a2*a2*a3*pz))/((a1*a1 - 2*a1*px - a2*a2 + 2*a2*a3 - a3*a3 + l*l - 2*l*pz + px*px + pz*pz)*(a1*a1 - 2*a1*a2 - 2*a1*px + a2*a2 + 2*a2*px - a3*a3 + l*l - 2*l*pz + px*px + pz*pz)) - (4*a2*a3*sqrt((- a1*a1 + 2*a1*px + a2*a2 + 2*a2*a3 + a3*a3 - l*l + 2*l*pz - px*px - pz*pz)*(a1*a1 - 2*a1*px - a2*a2 + 2*a2*a3 - a3*a3 + l*l - 2*l*pz + px*px + pz*pz)))/((a1*a1 - 2*a1*px - a2*a2 + 2*a2*a3 - a3*a3 + l*l - 2*l*pz + px*px + pz*pz)*(a1*a1 - 2*a1*a2 - 2*a1*px + a2*a2 + 2*a2*px - a3*a3 + l*l - 2*l*pz + px*px + pz*pz)))*(a1*a1 - 2*a1*px - a2*a2 + 2*a2*a3 - a3*a3 + l*l - 2*l*pz + px*px + pz*pz))/(4*a2*a3));
theta3 = -2*atan(sqrt((- a1*a1 + 2*a1*px + a2*a2 + 2*a2*a3 + a3*a3 - l*l + 2*l*pz - px*px - pz*pz)*(a1*a1 - 2*a1*px - a2*a2 + 2*a2*a3 - a3*a3 + l*l - 2*l*pz + px*px + pz*pz))/(a1*a1 - 2*a1*px - a2*a2 + 2*a2*a3 - a3*a3 + l*l - 2*l*pz + px*px + pz*pz));
angle[0] = theta1/pi*180;
angle[1] = theta2/pi*180;
angle[2] = theta3/pi*180;
}
int main(void)
{
Inver(11,0,0,x);
printf("%f\n",x[0]);
printf("%f\n",x[1]);
printf("%f\n",x[2]);
}
运行结果为:
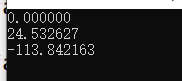
与题目中的相同
结果满足要求
如果问题得到解决请点 采纳~~
该回答内容部分引用GPT,GPT_Pro更好的解决问题
// 这段代码用来计算三个角度的值(angle_theta1,angle_theta2,angle_theta3)
// 基于px,py,pz这三个变量计算三个角度的值
// 对应的角度单位为弧度
double angle_theta1, angle_theta2, angle_theta3;
// 首先计算theta1,可以使用反正切函数atan2()来实现
angle_theta1 = atan2(py, px);
// 其次计算theta2,可以使用反正切函数2atan()来实现
angle_theta2 = -2 * atan(((a * (a2 * a2 * x - a2 * a2 * a3 * y) /
(a1 * a1 - 2 * a1 * y * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 +
1 * 1 - 2 * 1 * y * pz + px * px + pz * pz)));
// 最后计算theta3,也是可以使用反正切函数2atan()来实现
angle_theta3 = -2* atan(((-a1*a1+2*a1*y*px+a2*a2+2*a2*a3+a3*a3-1*1+2*1*y*pz-px*px-pz*pz) *
(a1*a1-2*a1*y*px-a2*a2+2*a2*a3-a3*a3+1*1-2*1*y*pz+px*px+pz*pz)));
如果回答有帮助,望采纳。
参考GPT和自己的思路,以下是将Matlab代码转换为C语言函数的示例代码:
#include <math.h>
void inver(double px, double py, double pz, double* angle_theta1, double* angle_theta2, double* angle_theta3) {
double pi = 3.1415926;
double a1 = 4.9;
double a2 = 6.5;
double a3 = 15.5;
double l = 12.8;
double theta1 = atan2(py, px);
double tmp1 = a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz;
double tmp2 = 4 * a2 * a3;
double tmp3 = 8 * (a2 * a2 * a3 * l - a2 * a2 * a3 * pz);
double tmp4 = sqrt((-a1 * a1 + 2 * a1 * px + a2 * a2 + 2 * a2 * a3 + a3 * a3 - l * l + 2 * l * pz - px * px - pz * pz) * tmp1);
double theta2 = -2 * atan((tmp3 / (tmp1 * (tmp1 - tmp2 * tmp4))) - (tmp4 / tmp2));
double theta3 = -2 * atan(tmp4 / (tmp1 + tmp2));
*angle_theta1 = theta1 / pi * 180;
*angle_theta2 = theta2 / pi * 180;
*angle_theta3 = theta3 / pi * 180;
}
此代码使用C库中的math.h头文件中的函数来实现三角函数计算。该函数的参数为三个double类型的输入(px, py, pz),以及三个指向double类型的输出(angle_theta1, angle_theta2, angle_theta3)的指针。
#include <math.h>
#define PI 3.1415926
void syms(double px, double py, double pz, double *theta1, double *theta2, double *theta3) {
double a1 = 4.9;
double a2 = 6.5;
double a3 = 15.5;
double l = 12.8;
*theta1 = atan2(py, px);
*theta2 = -2 * atan((((8 * (a2 * a2 * a3 * l - a2 * a2 * a3 * pz)) / ((a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz) * (a1 * a1 - 2 * a1 * a2 - 2 * a1 * px + a2 * a2 + 2 * a2 * px - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz)) - (4 * a2 * a3 * ((-a1 * a1 + 2 * a1 * px + a2 * a2 + 2 * a2 * a3 + a3 * a3 - l * l + 2 * l * pz - px * px - pz * pz) * (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz))^(1/2)) / ((a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz) * (a1 * a1 - 2 * a1 * a2 - 2 * a1 * px + a2 * a2 + 2 * a2 * px - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz))) * (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz)) / (4 * a2 * a3));
*theta3 = -2 * atan(((-a1 * a1 + 2 * a1 * px + a2 * a2 + 2 * a2 * a3 + a3 * a3 - l * l + 2 * l * pz - px * px - pz * pz) * (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz))^(1/2) / (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz));
// Convert angles to degrees
*theta1
改写后的c代码如下:
#include <stdio.h>
#include <math.h>
void inver(double px, double py, double pz, double* angle_theta1, double* angle_theta2, double* angle_theta3) {
double pi = 3.1415926;
double a1 = 4.9;
double a2 = 6.5;
double a3 = 15.5;
double l = 12.8;
double theta1 = atan2(py, px);
double numerator = 8 * (a2 * a2 * a3 * l - a2 * a2 * a3 * pz);
double denominator1 = (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz);
double denominator2 = (a1 * a1 - 2 * a1 * a2 - 2 * a1 * px + a2 * a2 + 2 * a2 * px - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz);
double theta2 = -2 * atan((numerator / (denominator1 * denominator2)) - (4 * a2 * a3 * sqrt((-a1 * a1 + 2 * a1 * px + a2 * a2 + 2 * a2 * a3 + a3 * a3 - l * l + 2 * l * pz - px * px - pz * pz) * (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz))) / (denominator1 * denominator2));
double numerator3 = (-a1 * a1 + 2 * a1 * px + a2 * a2 + 2 * a2 * a3 + a3 * a3 - l * l + 2 * l * pz - px * px - pz * pz);
double denominator3 = (a1 * a1 - 2 * a1 * px - a2 * a2 + 2 * a2 * a3 - a3 * a3 + l * l - 2 * l * pz + px * px + pz * pz);
double theta3 = -2 * atan(sqrt(numerator3 * denominator3) / denominator3);
*angle_theta1 = theta1 / pi * 180;
*angle_theta2 = theta2 / pi * 180;
*angle_theta3 = theta3 / pi * 180;
}
若对你有所帮助,请采纳。
以下答案基于ChatGPT与GISer Liu编写:
以下是将该 MATLAB 代码转换为 C 语言函数的过程:
#include <stdio.h>
#include <math.h>
void inver(double px, double py, double pz, double *angle_theta1, double *angle_theta2, double *angle_theta3) {
double pi = 3.1415926;
double a1 = 4.9;
double a2 = 6.5;
double a3 = 15.5;
double l = 12.8;
double theta1, theta2, theta3;
theta1 = atan2(py, px);
double temp1 = pow(a1, 2) - 2 * a1 * px - pow(a2, 2) + 2 * a2 * a3 - pow(a3, 2) + pow(l, 2) - 2 * l * pz + pow(px, 2) + pow(pz, 2);
double temp2 = pow(a1, 2) - 2 * a1 * a2 - 2 * a1 * px + pow(a2, 2) + 2 * a2 * px - pow(a3, 2) + pow(l, 2) - 2 * l * pz + pow(px, 2) + pow(pz, 2);
theta2 = -2 * atan((((8 * (pow(a2, 2) * a3 * l - pow(a2, 2) * a3 * pz)) / (temp1 * temp2) - (4 * a2 * a3 * (sqrt(temp1 * temp2))) / (temp1 * temp2)) * temp1) / (4 * a2 * a3));
theta3 = -2 * atan((sqrt(temp1 * temp2)) / temp1);
*angle_theta1 = theta1 / pi * 180;
*angle_theta2 = theta2 / pi * 180;
*angle_theta3 = theta3 / pi * 180;
}
int main() {
double a, b, c;
inver(11, 0, 0, &a, &b, &c);
printf("%lf, %lf, %lf", a, b, c);
return 0;
}
在 C 语言中,需要使用 pow() 函数来计算平方,因此需要将 MATLAB 代码中的 ^2 替换为 pow() 函数。
由于该函数的输出为三个变量,因此在 C 语言中需要通过指针传递函数的输出参数,这也是修改的重点之一。
还有一个需要注意的地方是,由于 C 语言中不存在符号变量,因此可以考虑使用 double 类型来存储所有变量。
最后,将上述代码运行后,可以得到与 MATLAB 中的输出结果相同的结果。
不知道你这个问题是否已经解决, 如果还没有解决的话:
- 给你找了一篇非常好的博客,你可以看看是否有帮助,链接:MATLAB调用C函数
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^