我想让四个直流编码电机pid走直然后delay 用时间控制他们行进距离
我想让四个直流编码电机pid走直然后delay 用时间控制他们行进距离 有什么办法可以做到啊
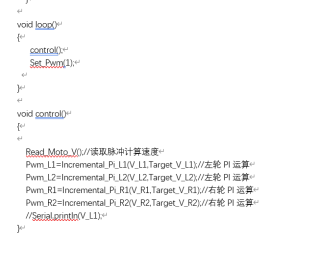
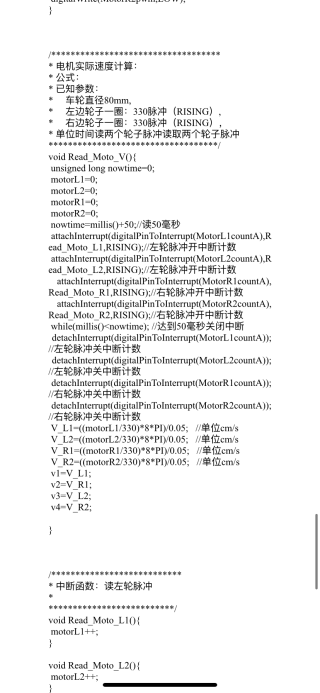
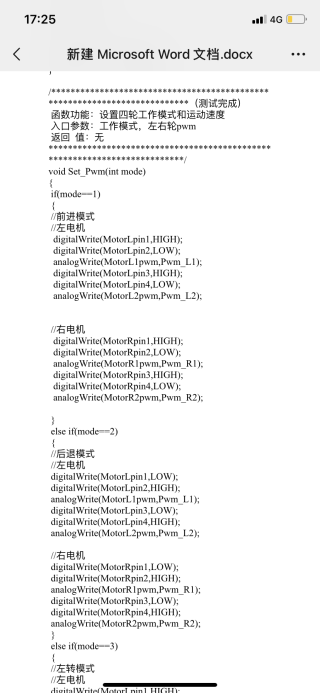
把你的 control() 和 Set_pwm() 函数放到周期定时器中断中执行,在loop中延时一段时间时间后把期望速度设为0 。
还可以把PID速度环改成位移环也能实现。
我想让四个直流编码电机pid走直然后delay 用时间控制他们行进距离 有什么办法可以做到啊
把你的 control() 和 Set_pwm() 函数放到周期定时器中断中执行,在loop中延时一段时间时间后把期望速度设为0 。
还可以把PID速度环改成位移环也能实现。