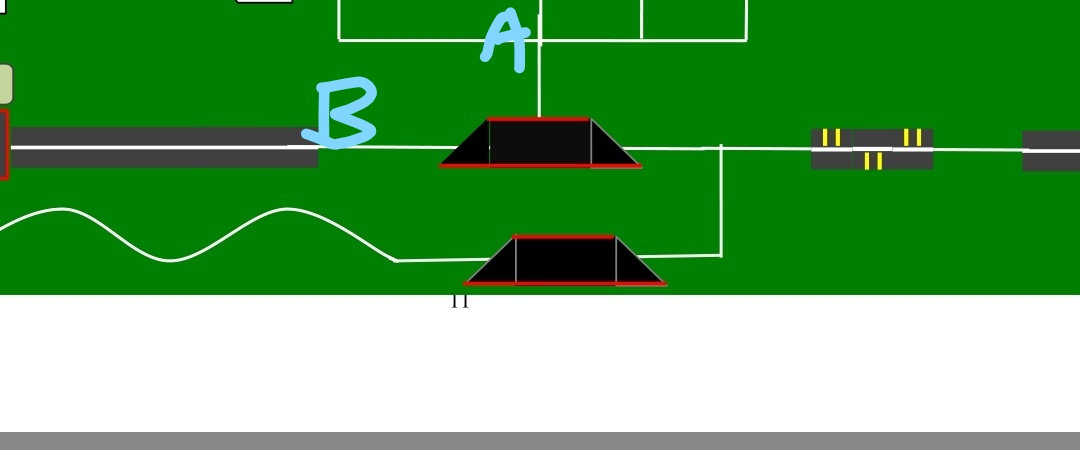
我在单片机的帖子里有详细的介绍,大概想知道的就是走斜坡的时候速度要如何变化好一些;用STM32写的和51板写的转弯、调速程序的差别;最好有个代码示例
![路线图!(https://img-ask.csdn.net/upload/201804/25/1524618252_156184.jpg)] 【斜坡图】(https://img-ask.csdn.net/upload/201804/25/1524618213_480108.jpg)
完美![路线图!(https://img-ask.csdn.net/upload/201804/25/1524618252_156184.jpg)] 【斜坡图】(https://img-ask.csdn.net/upload/201804/25/1524618213_480108.jpg)
![路线图!(https://img-ask.csdn.net/upload/201804/25/1524618252_156184.jpg)] 【斜坡图】(https://img-ask.csdn.net/upload/201804/25/1524618213_480108.jpg)
使用MPU6050内置的DMP,实现了载体的姿态解算,不仅简化代码设计,而且降低了MCU的负担,MCU不用进行姿态解算过程,从而有更多的时间去处理其他事件,提高系统实时性.通过设计的硬件平台,软件仿真了三轴陀螺仪、三轴加速度和欧拉角实时变化,结果表明,姿态解算稳定可靠(https://img-ask.csdn.net/upload/201804/25/1524618252_156184.jpg)] 【斜坡图】(https://img-ask.csdn.net/upload/201804/25/1524618213_480108.jpg.
使用MPU6050内置的DMP,实现了载体的姿态解算,不仅简化代码设计,而且降低了MCU的负担,MCU不用进行姿态解算过程,从而有更多的时间去处理其他事件,提高系统实时性.通过设计的硬件平台,软件仿真了三轴陀螺仪、三轴加速度和欧拉角实时变化,结果表明,姿态解算稳定可靠(https://img-ask.csdn.net/upload/201804/25/1524618252_156184.jpg)] 【斜坡图】(https://img-ask.csdn.net/upload/201804/25/1524618213_480108.jpg.
){kind=link}
{kind=link}