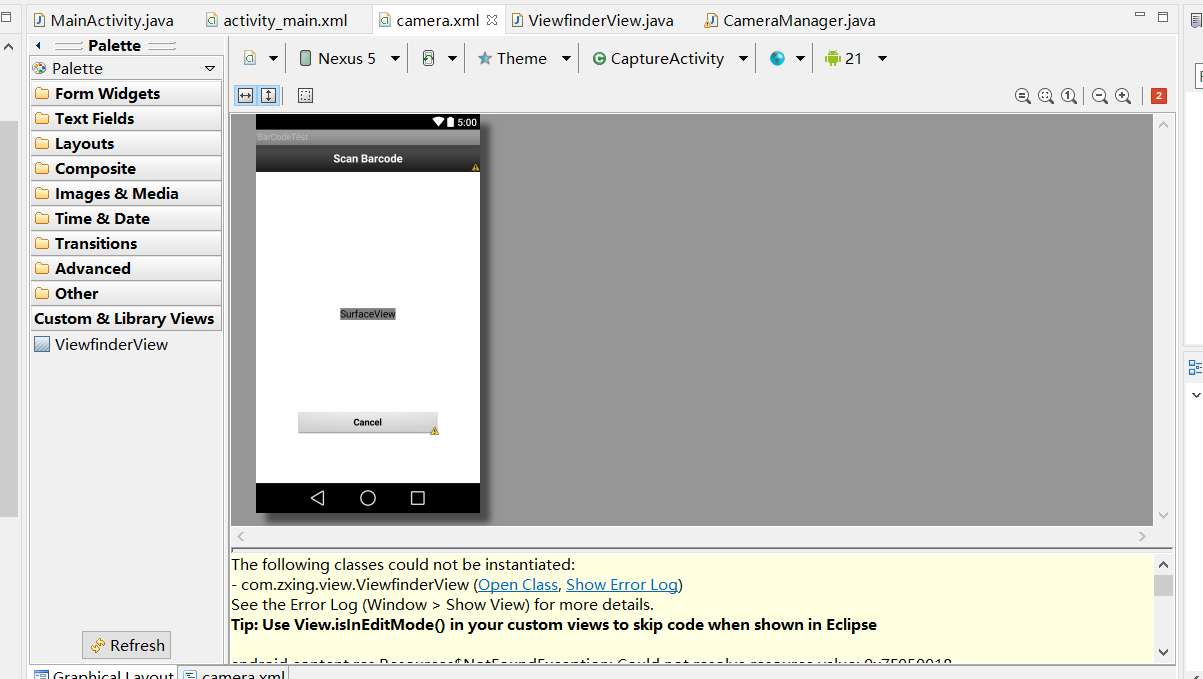
Android Zxing库里的ViewfinderView实例化的问题
下面的是代码,查了好多资料都找不出这个无法实例化的原因,求大佬帮忙解答一下。
package com.zxing.view;
import java.util.Collection;
import java.util.HashSet;
import android.content.Context;
import android.content.res.Resources;
import android.graphics.Bitmap;
import android.graphics.Canvas;
import android.graphics.Paint;
import android.graphics.Rect;
import android.util.AttributeSet;
import android.view.View;
import com.ericssonlabs.R;
import com.google.zxing.ResultPoint;
import com.zxing.camera.CameraManager;
/**
- This view is overlaid on top of the camera preview. It adds the viewfinder rectangle and partial
- transparency outside it, as well as the laser scanner animation and result points.
锟皆讹拷锟斤拷锟絍iew锟斤拷锟斤拷锟斤拷时锟叫硷拷锟斤拷示锟斤拷
*/
public final class ViewfinderView extends View {private static final int[] SCANNER_ALPHA = {0, 64, 128, 192, 255, 192, 128, 64};
private static final long ANIMATION_DELAY = 100L;
private static final int OPAQUE = 0xFF;private final Paint paint;
private Bitmap resultBitmap;
private final int maskColor;
private final int resultColor;
private final int frameColor;
private final int laserColor;
private final int resultPointColor;
private int scannerAlpha;
private Collection possibleResultPoints;
private Collection lastPossibleResultPoints;// This constructor is used when the class is built from an XML resource.
public ViewfinderView(Context context, AttributeSet attrs) {
super(context, attrs);// Initialize these once for performance rather than calling them every time in onDraw().
paint = new Paint();Resources resources = getResources();
maskColor = resources.getColor(R.color.viewfinder_mask);
resultColor = resources.getColor(R.color.result_view);
frameColor = resources.getColor(R.color.viewfinder_frame);
laserColor = resources.getColor(R.color.viewfinder_laser);
resultPointColor = resources.getColor(R.color.possible_result_points);
scannerAlpha = 0;
possibleResultPoints = new HashSet(5);
}@Override
public void onDraw(Canvas canvas) {
Rect frame = CameraManager.get().getFramingRect();
if (frame == null) {
return;
}
int width = canvas.getWidth();
int height = canvas.getHeight();// Draw the exterior (i.e. outside the framing rect) darkened
paint.setColor(resultBitmap != null ? resultColor : maskColor);
canvas.drawRect(0, 0, width, frame.top, paint);
canvas.drawRect(0, frame.top, frame.left, frame.bottom + 1, paint);
canvas.drawRect(frame.right + 1, frame.top, width, frame.bottom + 1, paint);
canvas.drawRect(0, frame.bottom + 1, width, height, paint);if (resultBitmap != null) {
// Draw the opaque result bitmap over the scanning rectangle
paint.setAlpha(OPAQUE);
canvas.drawBitmap(resultBitmap, frame.left, frame.top, paint);
} else {// Draw a two pixel solid black border inside the framing rect
paint.setColor(frameColor);
canvas.drawRect(frame.left, frame.top, frame.right + 1, frame.top + 2, paint);
canvas.drawRect(frame.left, frame.top + 2, frame.left + 2, frame.bottom - 1, paint);
canvas.drawRect(frame.right - 1, frame.top, frame.right + 1, frame.bottom - 1, paint);
canvas.drawRect(frame.left, frame.bottom - 1, frame.right + 1, frame.bottom + 1, paint);// Draw a red "laser scanner" line through the middle to show decoding is active
paint.setColor(laserColor);
paint.setAlpha(SCANNER_ALPHA[scannerAlpha]);
scannerAlpha = (scannerAlpha + 1) % SCANNER_ALPHA.length;
int middle = frame.height() / 2 + frame.top;
canvas.drawRect(frame.left + 2, middle - 1, frame.right - 1, middle + 2, paint);Collection currentPossible = possibleResultPoints;
Collection currentLast = lastPossibleResultPoints;
if (currentPossible.isEmpty()) {
lastPossibleResultPoints = null;
} else {
possibleResultPoints = new HashSet(5);
lastPossibleResultPoints = currentPossible;
paint.setAlpha(OPAQUE);
paint.setColor(resultPointColor);
for (ResultPoint point : currentPossible) {
canvas.drawCircle(frame.left + point.getX(), frame.top + point.getY(), 6.0f, paint);
}
}
if (currentLast != null) {
paint.setAlpha(OPAQUE / 2);
paint.setColor(resultPointColor);
for (ResultPoint point : currentLast) {
canvas.drawCircle(frame.left + point.getX(), frame.top + point.getY(), 3.0f, paint);
}
}// Request another update at the animation interval, but only repaint the laser line,
// not the entire viewfinder mask.
postInvalidateDelayed(ANIMATION_DELAY, frame.left, frame.top, frame.right, frame.bottom);
}
}public void drawViewfinder() {
resultBitmap = null;
invalidate();
}/**
- Draw a bitmap with the result points highlighted instead of the live scanning display. *
- @param barcode An image of the decoded barcode. */ public void drawResultBitmap(Bitmap barcode) { resultBitmap = barcode; invalidate(); }
public void addPossibleResultPoint(ResultPoint point) {
possibleResultPoints.add(point);
}
}
https://blog.csdn.net/AdrianAndroid/article/details/71544665