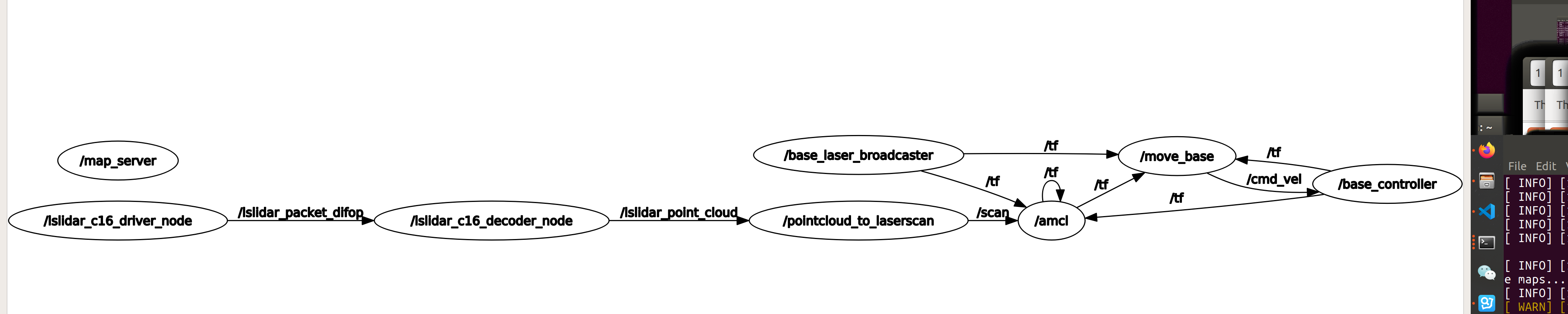
amcl不发布map-odom的坐标变换的原因是什么?
用16线激光雷达, point_cloud_to_laserscan转成scan, 用cartographer建好地图直接用.
导航包报错:Timed out waiting for transform from base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100487 timeout was 0.1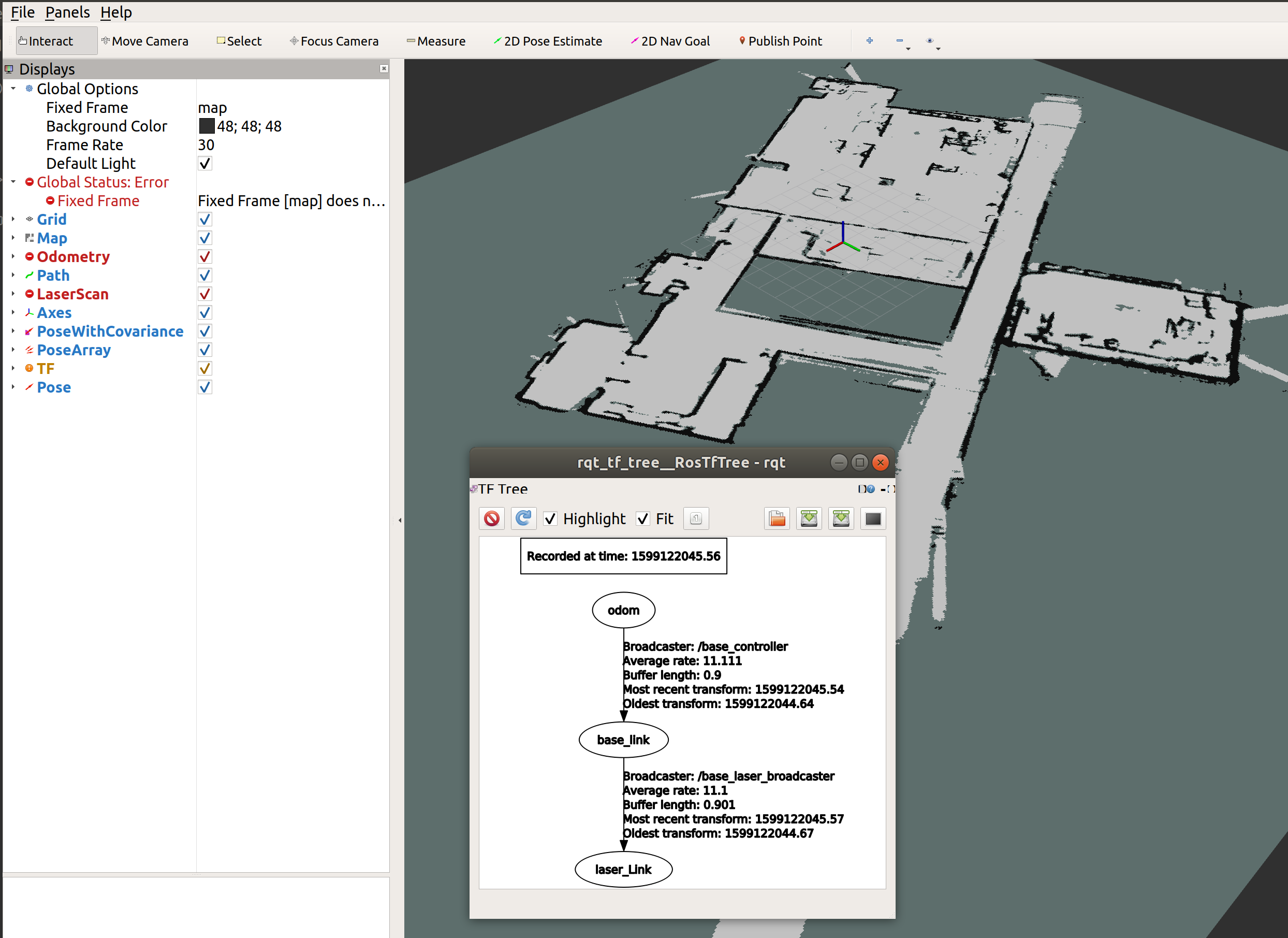
https://blog.csdn.net/weixin_43404836/article/details/104825519