turtlebot2导航输入roslaunch kinect2_nav.launch报错unable to set parameters(last param was[move_base/recovery_behavior_enabled=false])请问应该怎么办
使用turtlebot2和kinect2相机做机器人导航的时候输入roslaunch kinect2_nav.launch之后报了下面这个错误,应该怎么解决呢?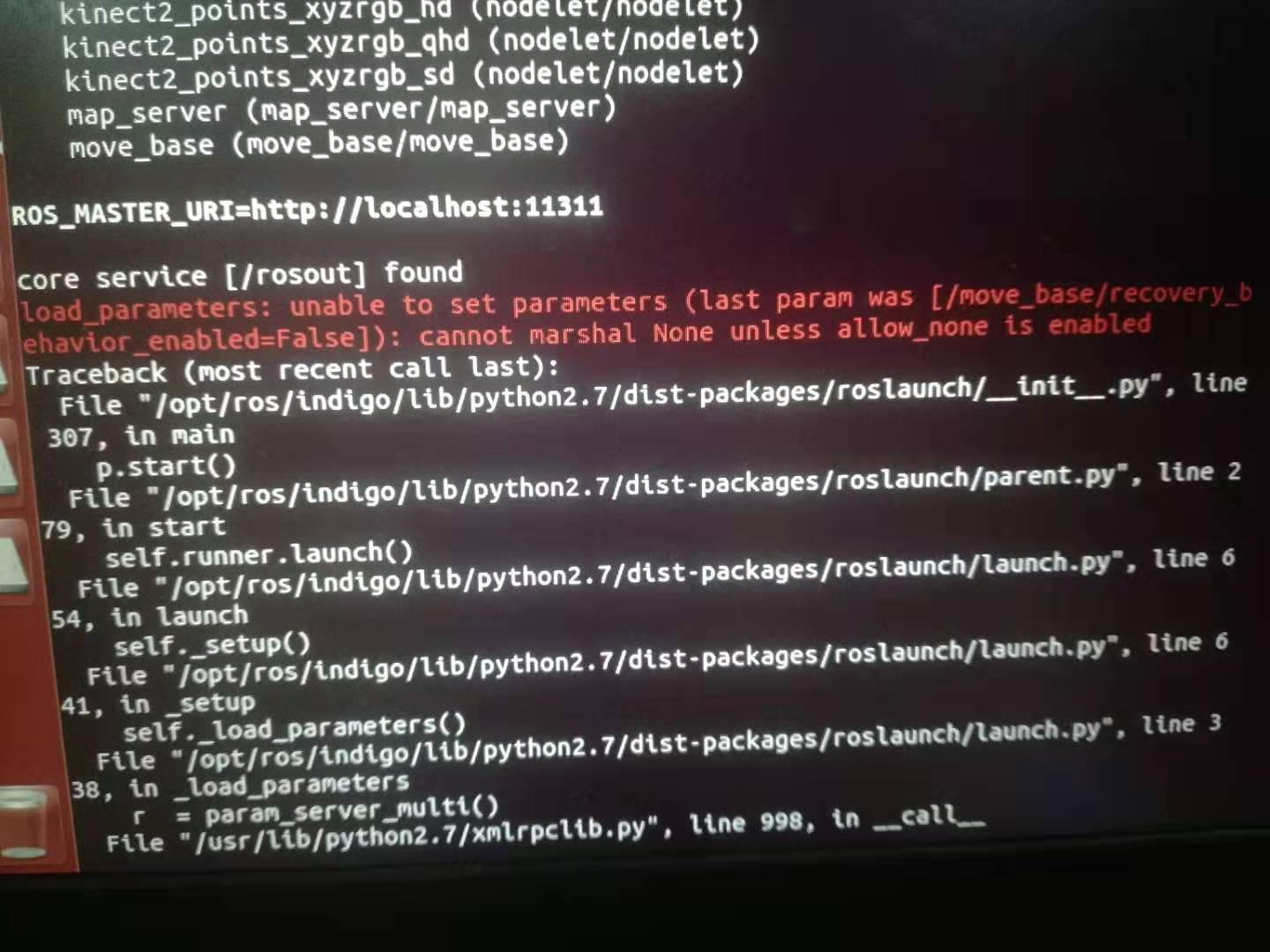
使用turtlebot2和kinect2相机做机器人导航的时候输入roslaunch kinect2_nav.launch之后报了下面这个错误,应该怎么解决呢?