用邻接矩阵创建有向网,求最小生成树,最短路径(c语言)。
大神求解!!!用邻接矩阵法创建一个有向网,将有向边直接视为无向边后,得到对应的无向图,则利用Prim算法求取最小生成树MST;利用Dijkstra算法对无向图求取顶点V1对图中其余各点的最短路径。(c语言)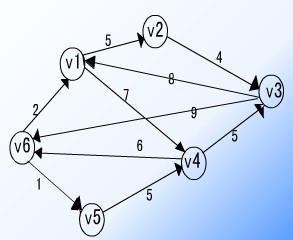
MGraph结构体表示邻接矩阵法表示的有向网,包括顶点数组、邻接矩阵和顶点数、弧数等信息。
MiniSpanTree_Prim函数利用Prim算法求最小生成树,并输出最小生成树的边和权值。
ShortestPath_Dijkstra函数利用Dijkstra算法求单源最短路径,并输出起点到各顶点的最短路径和距离。
在主函数中,先读入顶点和弧的权值,然后调用MiniSpanTree_Prim和ShortestPath_Dijkstra函数求解最小生成树和最短路径。
#include <stdio.h>
#include <stdlib.h>
#include <limits.h>
#define MAX_VERTEX_NUM 100 // 最大顶点数
#define INF INT_MAX // 无穷大
/* 邻接矩阵法表示的有向网 */
typedef struct {
int vertex[MAX_VERTEX_NUM]; // 顶点数组
int arc[MAX_VERTEX_NUM][MAX_VERTEX_NUM]; // 邻接矩阵
int vexnum, arcnum; // 顶点数和弧数
} MGraph;
/* Prim算法求最小生成树 */
void MiniSpanTree_Prim(MGraph G, int start) {
int lowcost[MAX_VERTEX_NUM]; // 存储V-U中各顶点到U的最小权值
int adjvex[MAX_VERTEX_NUM]; // 存储lowcost中最小值对应的顶点编号
int visited[MAX_VERTEX_NUM] = {0}; // 标记是否已加入U
int i, j, k, min;
// 初始化lowcost和adjvex数组
for (i = 0; i < G.vexnum; i++) {
lowcost[i] = G.arc[start][i];
adjvex[i] = start;
}
visited[start] = 1; // 将起点start加入U
// 依次加入剩余的n-1个顶点
for (i = 1; i < G.vexnum; i++) {
// 找到V-U中到U距离最小的顶点k
min = INF;
for (j = 0; j < G.vexnum; j++) {
if (visited[j] == 0 && lowcost[j] < min) {
min = lowcost[j];
k = j;
}
}
visited[k] = 1; // 将顶点k加入U
// 更新lowcost和adjvex数组
for (j = 0; j < G.vexnum; j++) {
if (visited[j] == 0 && G.arc[k][j] < lowcost[j]) {
lowcost[j] = G.arc[k][j];
adjvex[j] = k;
}
}
}
// 输出最小生成树的边和权值
printf("Prim算法求得的最小生成树为:\n");
for (i = 1; i < G.vexnum; i++) {
printf("(%d, %d) ", adjvex[i], i);
}
printf("\n最小权值为:%d\n", lowcost[1]);
}
/* Dijkstra算法求单源最短路径 */
void ShortestPath_Dijkstra(MGraph G, int start) {
int dist[MAX_VERTEX_NUM]; // 存储起点start到各顶点的最短距离
int path[MAX_VERTEX_NUM]; // 存储起点start到各顶点的最短路径中的上一个顶点
int visited[MAX_VERTEX_NUM] = {0}; // 标记是否已确定最短路径
int i, j, k, min;
// 初始化dist和path数组
for (i = 0; i < G.vexnum; i++) {
dist[i] = G.arc[start][i];
path[i] = start;
}
visited[start] = 1; // 将起点start加入集合S
// 依次确定剩余的n-1个顶点的最短路径
for (i = 1; i < G.vexnum; i++) {
// 找到未确定最短路径的顶点中距离start最近的顶点k
min = INF;
for (j = 0; j < G.vexnum; j++) {
if (visited[j] == 0 && dist[j] < min) {
min = dist[j];
k = j;
}
}
visited[k] = 1; // 将顶点k加入集合S
// 更新dist和path数组
for (j = 0; j < G.vexnum; j++) {
if (visited[j] == 0 && dist[k] + G.arc[k][j] < dist[j]) {
dist[j] = dist[k] + G.arc[k][j];
path[j] = k;
}
}
}
// 输出起点start到各顶点的最短路径和距离
printf("起点为%d的最短路径如下:\n", start);
for (i = 0; i < G.vexnum; i++) {
if (i != start) {
printf("V%d -> V%d: ", start, i);
j = i;
while (j != start) {
printf("V%d <- ", j);
j = path[j];
}
printf("V%d,距离为%d\n", start, dist[i]);
}
}
}
int main() {
MGraph G;
int i, j;
int start = 0; // 起点编号
// 输入顶点数和弧数
printf("请输入有向网的顶点数和弧数:");
scanf("%d%d", &G.vexnum, &G.arcnum);
// 输入顶点
printf("请输入%d个顶点:\n", G.vexnum);
for (i = 0; i < G.vexnum; i++) {
scanf("%d", &G.vertex[i]);
}
// 初始化邻接矩阵
for (i = 0; i < G.vexnum; i++) {
for (j = 0; j < G.vexnum; j++) {
G.arc[i][j] = INF;
}
}
// 输入弧的权值
printf("请输入%d条弧的起点、终点和权值:\n", G.arcnum);
for (i = 0; i < G.arcnum; i++) {
int start, end, weight;
scanf("%d%d%d", &start, &end, &weight);
G.arc[start][end] = weight;
G.arc[end][start] = weight; // 将有向边直接视为无向边
}
// 利用Prim算法求最小生成树
MiniSpanTree_Prim(G, start);
// 利用Dijkstra算法求单源最短路径
ShortestPath_Dijkstra(G, start);
return 0;
}