No valid compass calibration data?
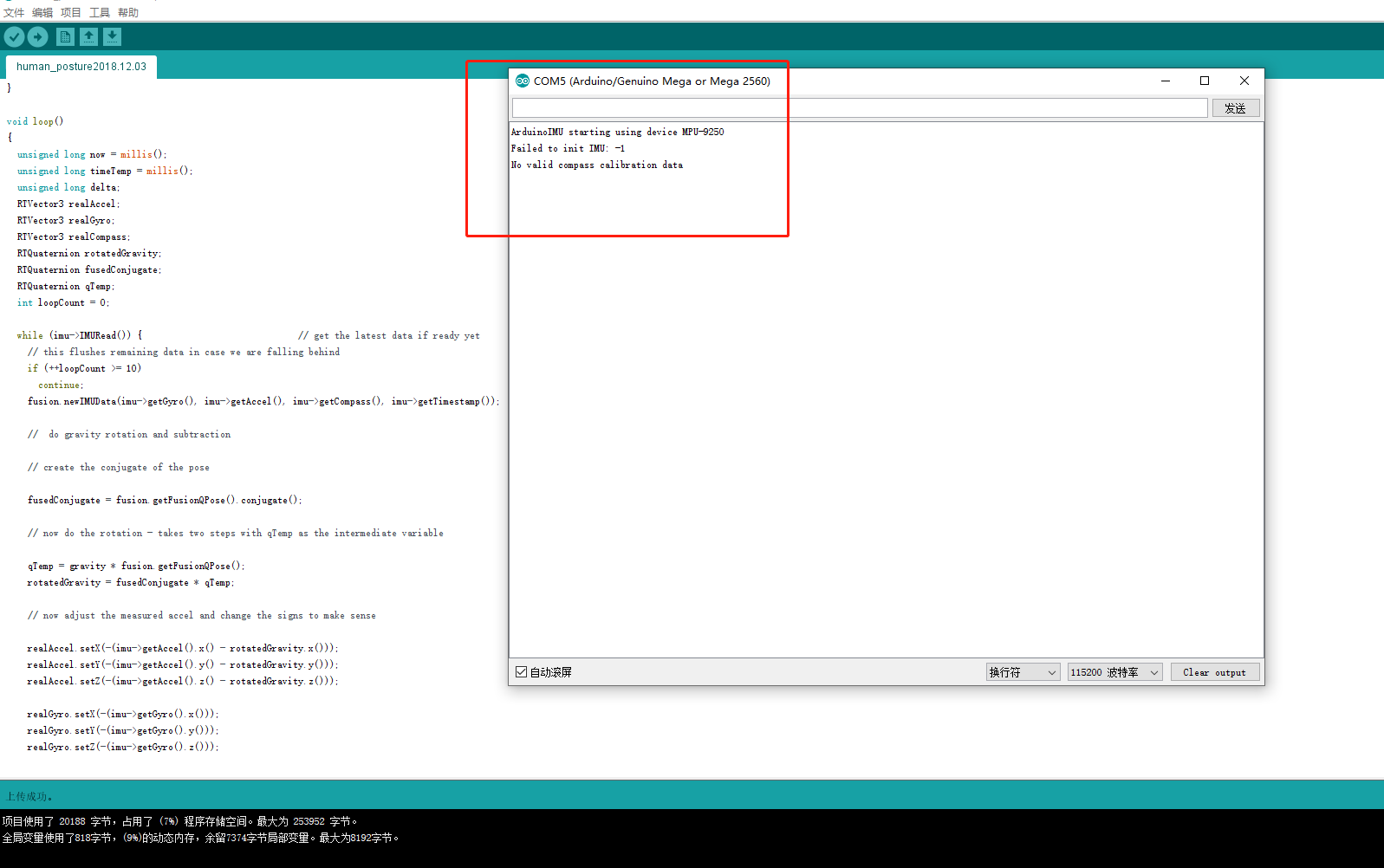
ArduinoIMU starting using device MPU-9250
Failed to init IMU: -1
No valid compass calibration data
关于yaw角的精确度,我一开始也遇到了这样的问题,后来换了个校准法,再测试发现还不错,具体使用时,Z轴朝下,测试单轴转动时,最好把方位角调到0,这样板子上的坐标系才能和世界坐标系重合,希望能对之后使用者提供一些帮助。
ArduinoIMU starting using device MPU-9250
Failed to init IMU: -1
No valid compass calibration data
关于yaw角的精确度,我一开始也遇到了这样的问题,后来换了个校准法,再测试发现还不错,具体使用时,Z轴朝下,测试单轴转动时,最好把方位角调到0,这样板子上的坐标系才能和世界坐标系重合,希望能对之后使用者提供一些帮助。