ros rviz机械臂仿真出现模型被复制的问题

rviz仿真机械臂的时候,为什么转动关节4,连杆1-3复制了一段跟着转,这个是什么原因?
不知道你这个问题是否已经解决, 如果还没有解决的话:- 这篇博客: ROS:两个节点分别实现图像的发布与订阅功能,以及在其中一个节点实现图像的预处理中的 6.在rviz可查看新旧话题发布情况 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
在新终端输入指令:rviz
ros@ubuntu:~$ rviz
分别添加新旧话题: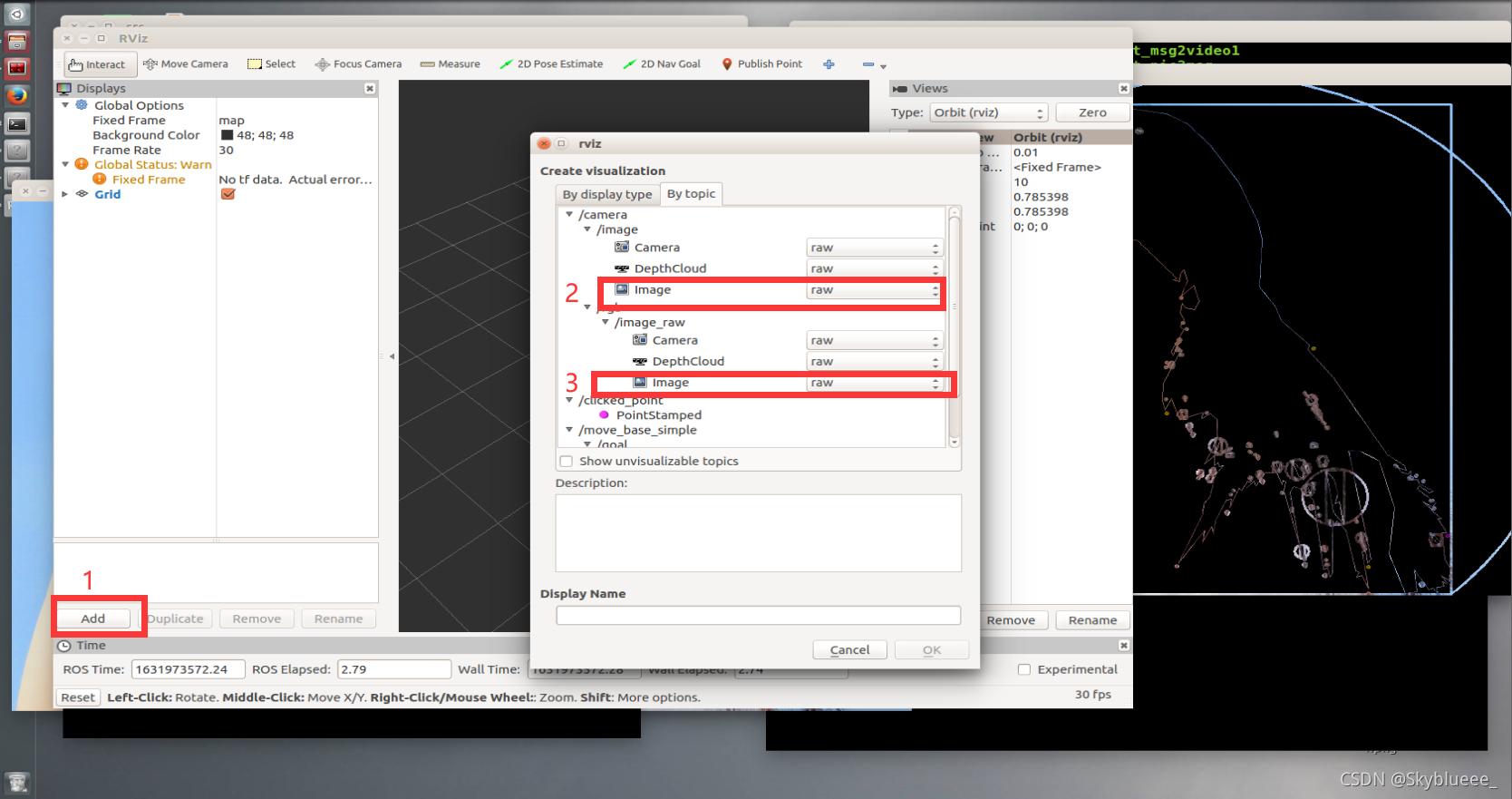
最终效果图: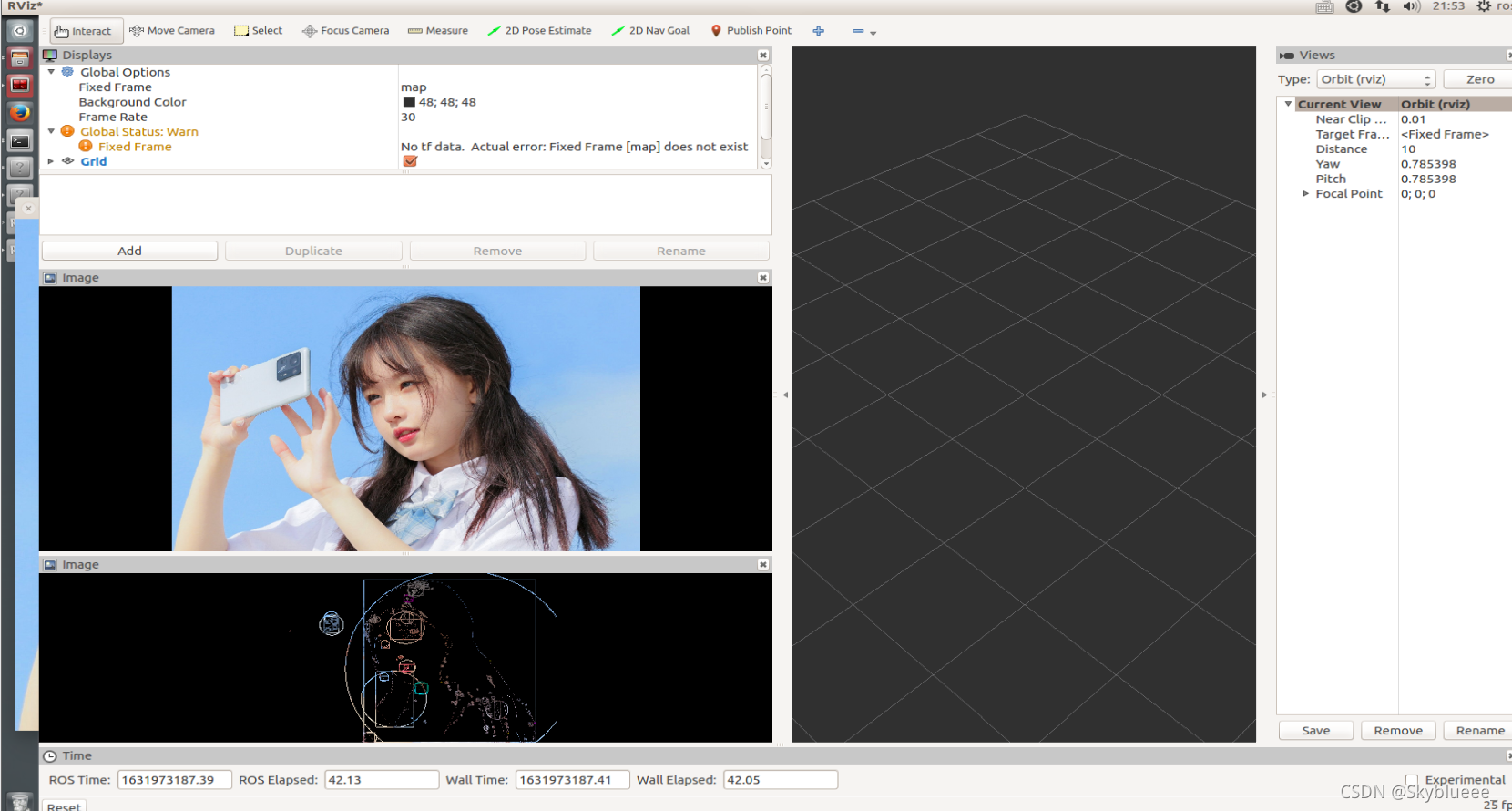
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^