offboard离地恒定高度
请问在px4飞控中,offboard模式下,如何实现离地恒定高度飞行(即随着地面升高,飞机跟着升高,且与地面之间高度距离恒定)?
具体怎么操作,改哪个话题就好?
- 这篇博客: PX4固件之Ros实现Offboard节点控制中的 PX4固件之Ros实现Offboard节点控制 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
这部分跟ardupilot固件流程没有区别。
主要对Ros、Mavros、gazebo、Mavproxy等深入了解一下。
首先运行Px4的gazebo仿真cd Firmware/ sudo make posix_sitl_default gazebo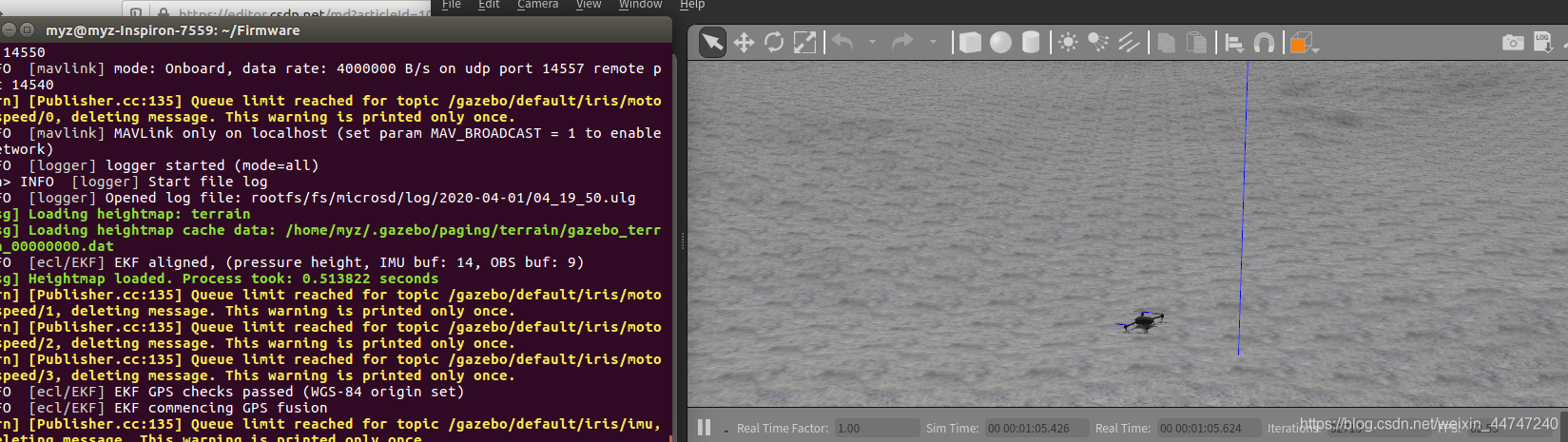 运行mavros
运行mavrosroslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"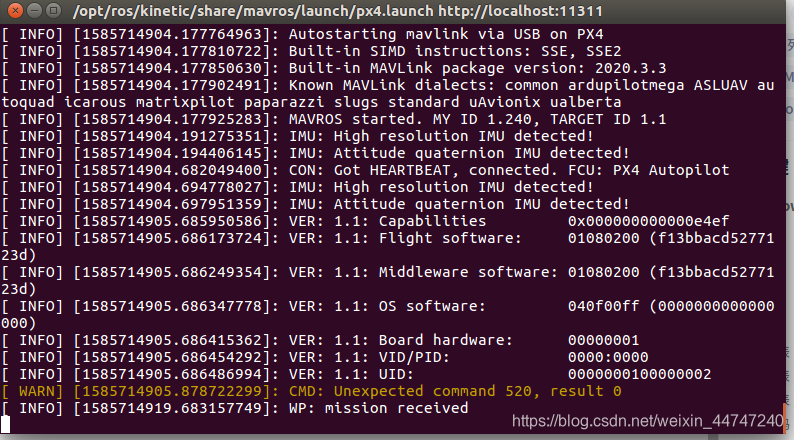 出现 mission received,表示连接成功。
出现 mission received,表示连接成功。运行Offboard节点控制,无人机会解锁起飞2m
rosrun offboard offboard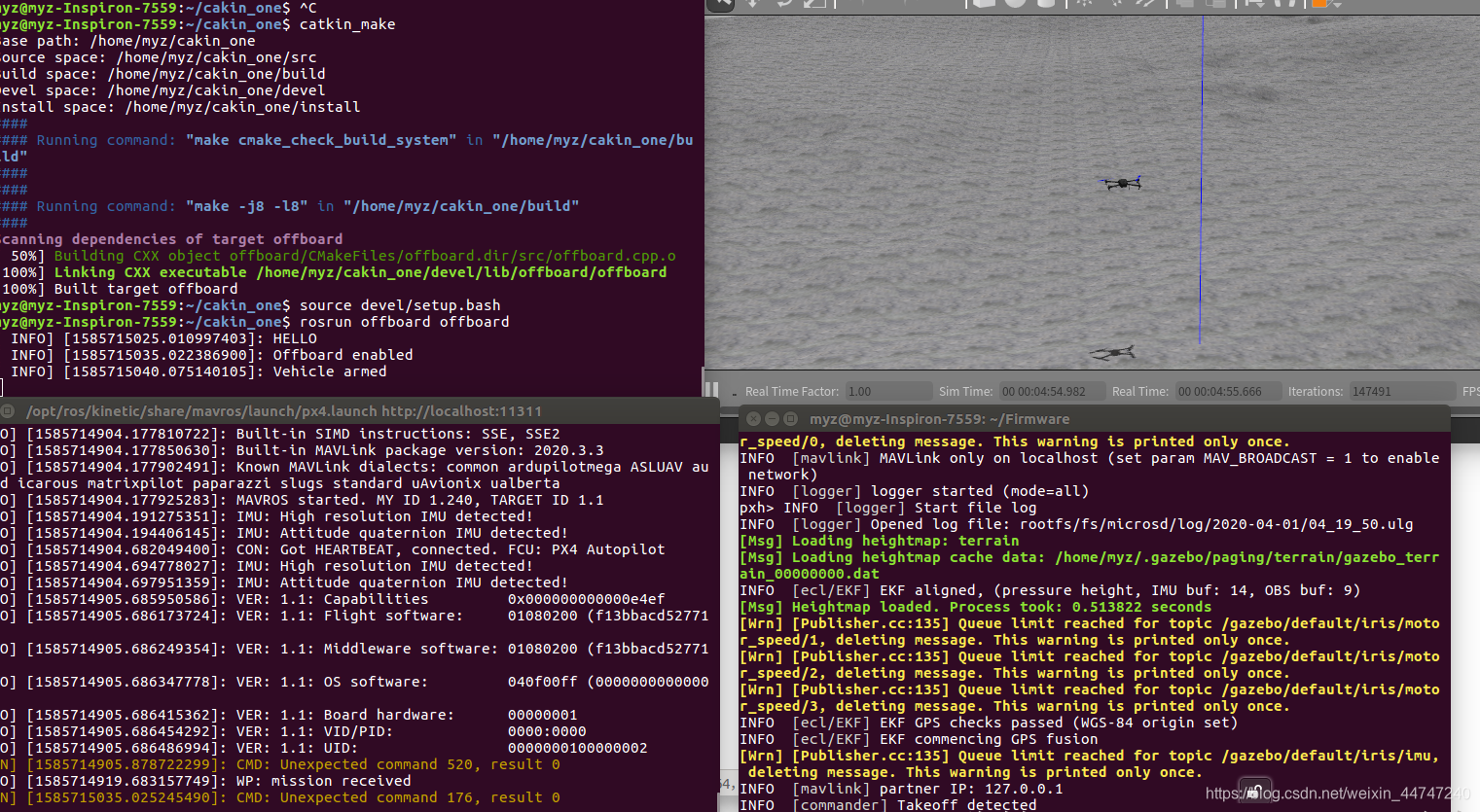 代码如下:
代码如下:/** * @file offb_node.cpp * @brief offboard example node, written with mavros version 0.14.2, px4 flight * stack and tested in Gazebo SITL */ #include <ros/ros.h> #include <geometry_msgs/PoseStamped.h> #include <mavros_msgs/CommandBool.h> #include <mavros_msgs/SetMode.h> #include <mavros_msgs/State.h> mavros_msgs::State current_state; void state_cb(const mavros_msgs::State::ConstPtr& msg){ current_state = *msg; } int main(int argc, char **argv) { ROS_INFO("HELLO"); ros::init(argc, argv, "offb_node"); ros::NodeHandle nh; ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State> ("mavros/state", 10, state_cb); ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped> ("mavros/setpoint_position/local", 10); ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool> ("mavros/cmd/arming"); ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode> ("mavros/set_mode"); //the setpoint publishing rate MUST be faster than 2Hz ros::Rate rate(20.0); // wait for FCU connection while(ros::ok() && current_state.connected){ ros::spinOnce(); rate.sleep(); } geometry_msgs::PoseStamped pose; pose.pose.position.x = 0; pose.pose.position.y = 0; pose.pose.position.z = 2; //send a few setpoints before starting for(int i = 100; ros::ok() && i > 0; --i){ local_pos_pub.publish(pose); ros::spinOnce(); rate.sleep(); } mavros_msgs::SetMode offb_set_mode; offb_set_mode.request.custom_mode = "OFFBOARD"; mavros_msgs::CommandBool arm_cmd; arm_cmd.request.value = true; ros::Time last_request = ros::Time::now(); while(ros::ok()){ if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0))){ if( set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent){ ROS_INFO("Offboard enabled"); } last_request = ros::Time::now(); } else { if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0))){ if( arming_client.call(arm_cmd) && arm_cmd.response.success){ ROS_INFO("Vehicle armed"); } last_request = ros::Time::now(); } } local_pos_pub.publish(pose); ros::spinOnce(); rate.sleep(); } return 0; }
回答部分参考、引用ChatGpt以便为您提供更准确的答案:
要在华为云上搭建使用Windows Server 2012的网站,您可以按照以下步骤进行操作:
- 登录华为云控制台:使用您的账号登录到华为云控制台。
- 创建云服务器:在控制台上导航到云服务器ECS页面,选择适当的地域和可用区,然后点击"创建云服务器"按钮。
- 选择镜像:在创建云服务器的过程中,选择Windows Server 2012作为镜像。您可以在镜像列表中搜索并选择合适的Windows Server 2012版本。
- 配置规格和网络:选择适当的云服务器规格和网络配置,包括实例类型、VPC、子网等。
- 设置安全组:配置安全组以允许入站和出站流量,确保Web服务器的相关端口(如HTTP、HTTPS)是开放的。
- 确认配置和购买:检查您的云服务器配置,确认无误后点击"购买"按钮,并完成购买流程。
- 访问云服务器:等待云服务器创建完成后,您将获得一个公网IP地址或者弹性IP地址。使用远程桌面(RDP)工具,通过该IP地址连接到您的Windows Server 2012云服务器。
- 安装IIS和配置网站:在Windows Server 2012上安装Internet Information Services (IIS)并配置您的网站。您可以使用IIS管理工具创建网站、设置绑定和虚拟目录等。
- 配置域名解析:如果您希望通过域名访问网站,您需要在域名注册商处配置域名解析,将域名指向您的云服务器的公网IP地址或弹性IP地址。
- 测试访问:完成上述步骤后,您可以使用浏览器访问您的网站,通过输入域名或公网IP地址来测试访问。
请注意,上述步骤提供了一个大致的指导,实际操作可能会因为您的具体需求和华为云平台的更新而有所不同。建议您参考华为云官方文档和相关资源,以获取详细的操作指南和最新的信息。
PX4+Offboard模式+代码控制无人机起飞(Gazebo)
可以参考下
https://blog.csdn.net/HuangChen666/article/details/128755418
在PX4飞控中,要实现离地恒定高度飞行,你可以使用以下方法进行操作:
设置目标高度:
在Offboard模式下,你需要通过向PX4发送适当的指令来告诉飞控你期望的飞行高度。可以通过Mavlink或ROS等通信协议向飞控发送SET_POSITION_TARGET_LOCAL_NED消息,其中包含你期望的高度信息。
配置高度控制器:
确保在飞控中配置了正确的高度控制器。你可以通过调整飞控的PID参数来优化高度控制性能。具体的参数配置可能会因飞控硬件和固件版本而异。
使用激光雷达或超声波传感器:
如果你希望在飞行过程中实时感知地面高度变化并保持恒定的高度差,你可以使用激光雷达或超声波传感器来测量地面距离。将传感器数据与目标高度进行比较,然后相应地调整飞行姿态。
需要注意的是,PX4飞控本身并不提供对地面高度的感知功能,所以你需要外部传感器或额外的模块来实现这个功能。具体的实现方式可能因具体硬件设备和软件平台而异。
此外,对于飞行控制的具体操作和代码编写,建议参考PX4官方文档和开发者社区,其中提供了详细的指南、示例代码和技术支持,以帮助你实现离地恒定高度飞行的功能。
在offboard模式下,默认是无法使用位置命令的,因此默认就无法实现固定高度的飞行,需要做一些操作才行。
首先你要进入到offboard模式下,这里需要使用代码实现,先创建一个线程,循环发布offboard_control_mode topic,然后再使用vehicle_command切换到offboard模式。
进入offboard模式以后,默认是无法使用位置,速度命令等来命令飞机飞行的,需要忽略掉加速度控制,才能进行速度、位置、姿态的控制ignore_acceleration_force=true;
可以通过rangefinder测距模块,并在offboard模式下使用相应的高度控制模块来控制飞机的高度
答案参考ChatGPT Plus版,整理汇总。希望能帮助你解决问题如果你想在 PX4 飞控中实现 offboard 模式下的离地恒定高度飞行,以下是一些具体的步骤和代码示例:
在你的代码中,首先确保你已经正确地启用了 offboard 模式和相应的高级控制器。这可以通过调用适当的函数来完成,例如在 C++ 中使用 mavros 库的
setMode()和setOffboardMode()函数。接下来,你需要发送高度控制的指令。你可以使用 SET_POSITION_TARGET_LOCAL_NED 消息来设置飞行器的期望位置。在这个消息中,你需要设置
type_mask字段为POSITION_TARGET_TYPEMASK_VX_IGNORE | POSITION_TARGET_TYPEMASK_VY_IGNORE | POSITION_TARGET_TYPEMASK_VZ_IGNORE | POSITION_TARGET_TYPEMASK_AX_IGNORE | POSITION_TARGET_TYPEMASK_AY_IGNORE,以忽略飞行器的位置和加速度。然后,设置target.z字段为你期望的高度值。这将告诉飞控保持特定的高度。使用飞控提供的通信接口(如 MAVLink)将上述消息发送到飞行控制器。你可以使用相应的函数来发送消息,如在 C++ 中使用 mavros 库的
setLocalPositionTarget()函数。飞行控制器将根据你发送的指令,在 offboard 模式下控制飞行器以保持恒定的高度。
需要注意的是,具体的实现可能会依赖于你所使用的通信库和编程语言。上述步骤和代码示例是基于使用 mavros 库和 MAVLink 协议的 C++ 环境。如果你使用其他编程语言或库,可能需要进行相应的调整。
另外,确保在飞行之前,你已经对飞行器进行了适当的校准和设置,并进行了必要的安全措施。此外,在进行飞行实验时,请在合适的环境中,并遵守当地的飞行规定和法律。
下面是一个使用 C++ 和 mavros 库实现 offboard 模式下离地恒定高度飞行的简单示例:
#include <ros/ros.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/PositionTarget.h>
int main(int argc, char** argv) {
ros::init(argc, argv, "offboard_control");
ros::NodeHandle nh;
// 创建相关的服务客户端
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>("/mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("/mavros/set_mode");
// 创建发布器
ros::Publisher position_target_pub = nh.advertise<mavros_msgs::PositionTarget>("/mavros/setpoint_raw/local", 10);
// 设置目标高度
float target_height = 5.0; // 设置目标高度为 5 米
// 设置 offboard 模式
mavros_msgs::SetMode offboard_set_mode;
offboard_set_mode.request.custom_mode = "OFFBOARD";
// 发送 offboard 模式请求
if (set_mode_client.call(offboard_set_mode) && offboard_set_mode.response.mode_sent) {
ROS_INFO("Offboard mode enabled");
} else {
ROS_ERROR("Failed to set offboard mode");
return -1;
}
// 解锁飞行器
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
if (arming_client.call(arm_cmd) && arm_cmd.response.success) {
ROS_INFO("Vehicle armed");
} else {
ROS_ERROR("Failed to arm the vehicle");
return -1;
}
ros::Rate rate(10); // 设置循环频率为 10Hz
while (ros::ok()) {
// 创建并填充 PositionTarget 消息
mavros_msgs::PositionTarget pos_target;
pos_target.coordinate_frame = mavros_msgs::PositionTarget::FRAME_LOCAL_NED;
pos_target.type_mask =
mavros_msgs::PositionTarget::IGNORE_PX |
mavros_msgs::PositionTarget::IGNORE_PY |
mavros_msgs::PositionTarget::IGNORE_PZ |
mavros_msgs::PositionTarget::IGNORE_VX |
mavros_msgs::PositionTarget::IGNORE_VY |
mavros_msgs::PositionTarget::IGNORE_VZ |
mavros_msgs::PositionTarget::IGNORE_AFX |
mavros_msgs::PositionTarget::IGNORE_AFY |
mavros_msgs::PositionTarget::IGNORE_AFZ |
mavros_msgs::PositionTarget::FORCE |
mavros_msgs::PositionTarget::IGNORE_YAW |
mavros_msgs::PositionTarget::IGNORE_YAW_RATE;
pos_target.force.z = target_height;
// 发布 PositionTarget 消息
position_target_pub.publish(pos_target);
ros::spinOnce();
rate.sleep();
}
return 0;
}
请注意,这只是一个简单的示例,具体实现可能需要根据你的项目和硬件进行调整。确保你已经正确安装了 ROS、mavros 和其他必要的依赖项,并将代码与你的工程进行适当的集成和配置。
希望这个示例对你有帮助
!如果你有进一步的问题,请随时提问。
基于new bing部分指引作答:
在PX4飞控中,要实现在offboard模式下离地恒定高度飞行,您需要更改控制逻辑和参数设置。以下是一些基本步骤:
1、配置参数:
打开QGroundControl(或其他地面站工具),连接到您的飞控。
转到参数设置界面。
搜索并找到以下参数,并进行相应设置:
MPC_ALT_MODE:将其设置为2(高度)。
MPC_Z_VEL_MAX_DN:设置下降速度限制,以确保稳定的下降。
MPC_Z_VEL_MAX_UP:设置上升速度限制,以确保稳定的上升。
MPC_Z_P:设置高度控制器的比例增益。
MPC_Z_VEL_P:设置高度速度控制器的比例增益。
MPC_TKO_SPEED:设置起飞时的爬升速度。
2、编写控制逻辑:
在您选择的offboard控制接口中,例如使用ROS或MavSDK编写控制逻辑。
您可以使用所选接口的API来发送期望的姿态或位置指令。
对于离地恒定高度飞行,您需要在控制逻辑中定期发送期望高度指令。
3、发送指令:
在控制逻辑中,以所选接口的方式发送期望高度指令。具体方式取决于您使用的接口。
例如,如果使用ROS,您可以使用mavros包中的setpoint_raw话题发布期望位置的高度值。
上述步骤只是基本指导,具体实现可能会根据您的需求和使用的接口有所不同。确保在实际飞行之前,充分测试和验证控制逻辑,并遵循安全操作规程。
以下是一个使用ROS和MavROS库的简单示例代码,用于在offboard模式下实现离地恒定高度飞行:
import rospy
from mavros_msgs.msg import PositionTarget
from mavros_msgs.srv import SetMode
from geometry_msgs.msg import PoseStamped
# 回调函数,接收当前高度信息
def local_position_callback(msg):
current_height = msg.pose.position.z
# 在此处可以添加控制逻辑
# 发送期望高度指令
def setpoint_height(height):
msg = PositionTarget()
msg.header.stamp = rospy.Time.now()
msg.coordinate_frame = PositionTarget.FRAME_LOCAL_NED
msg.type_mask = PositionTarget.IGNORE_VX + PositionTarget.IGNORE_VY + PositionTarget.IGNORE_VZ + \
PositionTarget.IGNORE_AFX + PositionTarget.IGNORE_AFY + PositionTarget.IGNORE_AFZ + \
PositionTarget.IGNORE_YAW + PositionTarget.IGNORE_YAW_RATE
msg.position.z = height
setpoint_pub.publish(msg)
# 进入offboard模式
def set_offboard_mode():
rospy.wait_for_service('/mavros/set_mode')
try:
set_mode = rospy.ServiceProxy('/mavros/set_mode', SetMode)
response = set_mode(0, 'OFFBOARD') # 设置模式为OFFBOARD
return response.mode_sent
except rospy.ServiceException as e:
print("Service call failed: %s" % e)
if __name__ == '__main__':
rospy.init_node('offboard_height_control')
# 订阅本地位置信息
rospy.Subscriber('/mavros/local_position/pose', PoseStamped, local_position_callback)
# 发布期望位置信息
setpoint_pub = rospy.Publisher('/mavros/setpoint_raw/local', PositionTarget, queue_size=10)
# 进入offboard模式
set_offboard_mode()
# 发送离地恒定高度指令
target_height = 2.0 # 设置目标高度为2米
rate = rospy.Rate(10) # 控制发送频率为10Hz
while not rospy.is_shutdown():
setpoint_height(target_height)
rate.sleep()
上述代码仅提供了一个基本的框架,用于理解如何在offboard模式下发送高度指令。您可能需要根据实际情况进行修改和扩展,以满足您的特定需求。在使用代码之前,请确保已正确安装和配置ROS、MavROS和相关依赖,并按照PX4飞控的要求进行连接和设置。
答:在PX4飞控中,离地恒定高度飞行可以通过设置高度控制器来实现。在offboard模式下,可以通过以下步骤实现:
1、确保飞控已经连接到遥控器并启动。
2、在遥控器上设置所需的飞行高度。
3、在PX4飞控中,将高度控制器的话题设置为/mavlink/ height。
4、在PX4飞控中,将高度控制器的min_distance和max_distance设置为合适的值,以确保飞机在起飞和降落时不会碰到障碍物。
5、启动高度控制器并等待飞机起飞。
6、当飞机达到所需的高度时,高度控制器将自动调整飞行器的位置和速度,以保持高度不变。