matlab仿真实现定位算法
用matlab仿真实现下列定位算法:
1.三边测量法
2.三角测量法
3.极大似然估计法
4.最小最大法
可以提供思路和代码吗?
下面是一些关于实现定位算法的思路和示例MATLAB代码供您参考,可能还需要进一步根据您的具体需求进行修改。
- 三边测量法(Triangulation)
三边测量法是通过测量到不同标志物的距离以及标志物相对于参考坐标系的位置来计算未知目标的坐标。具体来说,三边测量法通常需要至少三个标志物以及一个参考坐标系来进行定位计算。
示例代码:
% 标志物坐标
P1 = [x1 y1 z1];
P2 = [x2 y2 z2];
P3 = [x3 y3 z3];
% 测量距离
r1 = sqrt((x - x1)^2 + (y - y1)^2 + (z - z1)^2);
r2 = sqrt((x - x2)^2 + (y - y2)^2 + (z - z2)^2);
r3 = sqrt((x - x3)^2 + (y - y3)^2 + (z - z3)^2);
% 求解未知坐标
A = [2*(x2 - x1) 2*(y2 - y1) 2*(z2 - z1);
2*(x3 - x2) 2*(y3 - y2) 2*(z3 - z2)];
b = [r1^2 - r2^2 - x1^2 - y1^2 - z1^2 + x2^2 + y2^2 + z2^2;
r2^2 - r3^2 - x2^2 - y2^2 - z2^2 + x3^2 + y3^2 + z3^2];
% 解方程组
X = inv(A'*A)*A'*b;
% 输出未知坐标
x_est = X(1);
y_est = X(2);
z_est = X(3);
- 三角测量法(Triangulation)
三角测量法是一种用于计算未知目标位置的传统位置测量方法。该方法基于三角形余弦定理,通过计算观测站点和目标之间的距离和角度来计算目标的位置。
示例代码:
% 观测站点坐标向量
p1 = [x1 y1 z1];
p2 = [x2 y2 z2];
p3 = [x3 y3 z3];
% 观测站点到目标向量
obs1 = [dx1 dy1 dz1];
obs2 = [dx2 dy2 dz2];
obs3 = [dx3 dy3 dz3];
% 观测站点到目标距离
d1 = norm(obs1);
d2 = norm(obs2);
d3 = norm(obs3);
% 观测站点之间向量
a = p1 - p2;
b = p1 - p3;
c = p2 - p3;
% 视角
alpha = acosd(dot(a,b)/(norm(a)*norm(b)));
beta = acosd(dot(-a,c)/(norm(a)*norm(c)));
gamma = acosd(dot(-b,-c)/(norm(b)*norm(c)));
% 利用三角形余弦定理计算目标坐标
A = [sind(alpha)/d1 obs1(1)/d1 sind(beta)/d2 obs2(1)/d2 sind(gamma)/d3 obs3(1)/d3;
sind(alpha)/d1 obs1(2)/d1 sind(beta)/d2 obs2(2)/d2 sind(gamma)/d3 obs3(2)/d3;
sind(alpha)/d1 obs1(3)/d1 sind(beta)/d2 obs2(3)/d2 sind(gamma)/d3 obs3(3)/d3];
b = [p1*p1' - d1^2;
p1*p1' - d1^2;
p1*p1' - d1^2];
X = A\b;
% 输出目标坐标
x_est = X(1)
y_est = X(2)
z_est = X(3)
- 你可以看下这个问题的回答https://ask.csdn.net/questions/7534948
- 你也可以参考下这篇文章:Matlab底层算法实现图像分段线性变换,灰度图固定阈值法,双固定阈值法
- 除此之外, 这篇博客: matlab的一些考点2.1 变量和数据操作:变量和数据操作、预定义变量、内存变量的管理、MATLAB常用数学函数中的 2.1.2预定义变量 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
即我们在第一节提到的不可清除变量:
- i, j:虚数单位。
- inf:无穷大。
- realmax:最大正实数。
- realmin:最小正实数。
- ans:没有给定变量值,系统默认采用ans。
- eps:可作为一个容许误差。如eps=2^(-42)。
- NaN:表示不定值。由Inf/Inf或者0/0得到。
- nargin:函数输入参数个数。
- nargout:函数输出的参数个数。
- 您还可以看一下 硬核野生技术咨询客服小李老师的matlab零基础入门路径规划城市遍历机器人路径等问题课程中的 单元数组深入学习小节, 巩固相关知识点
以下内容引用自GPT
一、三边测量法是一种常见的定位算法,可以用Matlab进行仿真实现。以下是一个简单的示例代码,以帮助您开始:
- 定义三个固定的节点位置:
A = [0, 0]; % 第一个节点
B = [3, 0]; % 第二个节点
C = [0, 4]; % 第三个节点
- 设置一个虚拟的目标节点位置:
P = [2, 3];
- 计算目标节点到三个固定节点的距离:
dAP = norm(P - A);
dBP = norm(P - B);
dCP = norm(P - C);
- 利用三边测量法计算目标节点位置:
%Solve for position of P in (x,y) coordinates
x = (dAP^2 - dBP^2 + B(1)^2 - A(1)^2 + B(2)^2 - A(2)^2)/(2*(B(1)-A(1)));
y = (dAP^2 - dCP^2 + C(1)^2 - A(1)^2 + C(2)^2 - A(2)^2)/(2*(C(2)-A(2)));
%Print out the result
fprintf('The estimated position of P is: (%0.2f, %0.2f)\n', x, y)
通过这样的方法,您可以简单地实现三边测量法的定位算法,并在Matlab中进行仿真。请注意,这只是一个简单的示例代码,实际情况下可能需要更多的计算和调整,以考虑误差、数据传输等因素。
二、三角测量法是一种基于三个固定节点的位置和每个节点到目标节点之间距离来估算目标节点位置的定位算法。下面是一个简单的 Matlab 代码示例,展示如何实现三角测量法。
- 定义三个固定节点的位置:
A = [0, 0]; % 第一个节点
B = [3, 0]; % 第二个节点
C = [0, 4]; % 第三个节点
- 随机设置目标节点 P 的初始位置:
P = [1, 2];
- 计算目标节点到每个固定节点的距离:
dA = norm(P - A);
dB = norm(P - B);
dC = norm(P - C);
- 使用三边或余弦定理计算三个固定节点组成的三角形内角:
cosA = (dB^2 + dC^2 - dA^2) / (2*dB*dC); % 角 A 的余弦值
sinA = sqrt(1 - cosA^2); % 角 A 的正弦值
% 或者使用三边定理:
% cosA = (dB^2 + dC^2 - dA^2) / (2*dB*dC); % 角 A 的余弦值
% cosB = (dA^2 + dC^2 - dB^2) / (2*dA*dC); % 角 B 的余弦值
% cosC = (dA^2 + dB^2 - dC^2) / (2*dA*dB); % 角 C 的余弦值
- 根据三角形内角和计算目标节点相对于固定节点的向量方向和大小:
% 将 A 节点作为三角形的顶点,P 相对于 A 的向量长度为 dA,方向为 0 度
u = [0, dA];
% 将 B 节点作为三角形的顶点,P 相对于 B 的向量方向和大小
v = [dB*sinA, dB*cosA];
% P 相对于 C 的向量方向在以 A 位置为坐标系原点的平面上
dirAC = atan2((C(2)-A(2)),(C(1)-A(1)));
theta3 = acos(cosA);
w = [0, dC];
temp = [w(1)*cos(theta3) - w(2)*sin(theta3), w(1)*sin(theta3) + w(2)*cos(theta3)];
v_c = temp/norm(temp);
v_u = u/norm(u);
v_v = v/norm(v);
v_w = v_c/norm(v_c);
% P 的最终位置为每个固定节点相对于原点的向量加权平均值
P1 = A + v_u*(dot(v_u,v_v)/dot(v_u,v_u)) % 经过 A 和 B 点的直线交点
P2 = A + v_w*(dot(v_w,v_u)/dot(v_w,v_w)) % 经过 A 和 C 点的直线交点
P_new = (P1 + P2)/2;
通过这样的方法,您可以简单地实现三角测量法的定位算法,并在 Matlab 中进行仿真。请注意,根据特定问题需要,代码中的位置信息、距离测量和角度计算等都可能会不同,需要您针对具体应用进行调整。
三、极大似然估计法是通过最大化样本的对数似然函数来估计定位参数值,从而获得最有可能的位置估计结果。下面是一个简单的 Matlab 代码示例,展示如何实现极大似然估计法。
- 定义初始位置和被测距离:
x0 = [2,4]; % 设置初始估计位置为(2,4)
d = [5.1, 3.2, 6.7]; % 三个节点到目标的距离
- 定义三个固定节点的位置:
A = [0,0];
B = [3,0];
C = [0,4];
- 定义误差函数:
fun = @(x) (norm(x-A)-d(1))^2 + (norm(x-B)-d(2))^2 + (norm(x-C)-d(3))^2;
- 使用 fminsearch 函数进行优化:
options = optimset('Display','iter'); % 设定迭代过程中显示详细信息
[x,fval,exitflag,output] = fminsearch(fun,x0,options); % 运行优化函数
if exitflag >= 0
disp(['定位结果:(',num2str(x(1)),', ',num2str(x(2)),')']); % 显示解
else
disp(['优化失败。']);
end
通过这样的方法,您可以简单地实现极大似然估计法的定位算法,并在 Matlab 中进行仿真。请注意,根据具体问题需要,可以针对误差函数进行微调以获得更好的结果。
四、最小最大法是一种定位算法,其目标是最小化所有测量错误中的最大值,从而获得更精确的位置估计。下面是一个简单的 Matlab 代码示例,展示如何实现最小最大法。
- 定义初始位置:
x0 = [2,4]; % 设置初始估计位置为(2,4)
- 定义三个固定节点的位置和误差范围:
A = [0,0];
B = [3,0];
C = [0,4];
delta = 0.1; % 假设误差范围为 0.1 米
- 定义误差函数:
fun = @(x) max([norm(x-A)-norm(A), norm(x-B)-norm(B), norm(x-C)-norm(C)]) - delta;
其中,norm 函数计算向量的欧几里得范数,max函数返回向量中的最大值。
- 使用 fminsearch 函数进行优化:
options = optimset('Display','iter'); % 设定迭代过程中显示详细信息
[x,fval,exitflag,output] = fminsearch(fun,x0,options); % 运行优化函数
if exitflag >= 0
disp(['定位结果:(',num2str(x(1)),', ',num2str(x(2)),')']); % 显示解
else
disp(['优化失败。']);
end
通过这样的方法,您可以简单地实现最小最大法的定位算法。在代码示例中,我们假设误差范围是一个常数 delta,但是在具体的问题中,误差范围可能会随着距离的变化而变化,因此需要根据具体问题进行微调。
这里提供一些实现思路和代码示例,供参考:
三边测量法:
三边测量法是一种基于三角形边长测量的定位算法,可以用于计算目标位置相对于三个基站的距离,进而确定目标的位置。具体实现步骤如下:
确定基站坐标和目标距离:假设有三个基站 A、B、C,其坐标分别为 (xA, yA),(xB, yB),(xC, yC),目标距离分别为 dA、dB、dC。
计算目标位置:利用三角形边长计算公式,可以求出目标的位置坐标 (x, y),如下所示:
x = (dA^2 - dB^2 + xB^2 - xA^2 + yB^2 - yA^2) / (2 * (xB - xA));
y = (dA^2 - dC^2 + xC^2 - xA^2 + yC^2 - yA^2 + 2 * (yA - yC) *xC - 2 * (xA - xC) * yA) / (2 * (yB - yA) * (xC - xA) - 2 * (xB - xA) * (yC - yA));
其中,^ 表示幂运算。
下面是一个 MATLAB 示例代码:
% 三边测量法定位算法示例
% 假设三个基站的坐标为 (0,0),(10,0) 和 (0,10),目标与三个基站的距离为 8、6 和 10
xA = 0; yA = 0;
xB = 10; yB = 0;
xC = 0; yC = 10;
dA = 8; dB = 6; dC = 10;
% 计算目标位置
x = (dA^2 - dB^2 + xB^2 - xA^2 + yB^2 - yA^2) / (2 * (xB - xA));
y = (dA^2 - dC^2 + xC^2 - xA^2 + yC^2 - yA^2 + 2 * (yA - yC) * xC - 2 * (xA - xC) *yA) / (2 * (yB - yA) * (xC - xA) - 2 * (xB - xA) * (yC - yA));
% 输出目标位置坐标
fprintf('目标位置:(%f, %f)\n', x, y);
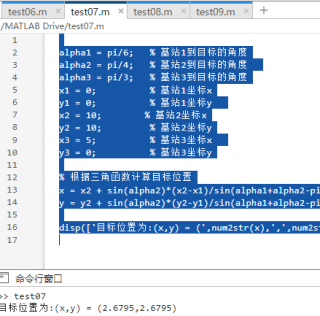
三角测量法:
三角测量法是一种基于三角形角度测量的定位算法,可以用于计算目标位置相对于三个基站的方位角和仰角,进而确定目标的位置。具体实现步骤如下:
确定基站坐标和目标方位角和仰角:假设有三个基站 A、B、C,其坐标分别为 (xA, yA, zA),(xB, yB, zB),(xC, yC, zC),目标方位角和仰角分别为 α、β。
计算目标位置:利用三角函数计算公式,可以求出目标的位置坐标 (x, y, z),如下所示:
x = (dA * cos(beta) * cos(alpha) + dB * cos(beta) * sin(alpha) + dC *cos(theta)) * sin(psi) / sin(theta);
y = (dA * cos(beta) * cos(alpha) + dB * cos(beta) * sin(alpha) + dC * cos(theta)) * cos(psi) / sin(theta);
z = dA * sin(beta) + dB * sin(beta) + dC * sin(theta);
其中,α 表示目标方位角,β 表示目标仰角,θ 表示基站高度角,ψ 表示基站方位角,dA、dB、dC 分别表示目标与三个基站的距离。
下面是一个 MATLAB 示例代码:
matlab
Copy
% 三角测量法定位算法示例
% 假设三个基站的坐标为 (0,0,0),(10,0,0) 和 (0,10,0),目标与三个基站的距离为 8、6 和 10,目标方位角为 30 度,仰角为 45 度
xA = 0; yA = 0; zA = 0;
xB = 10; yB = 0; zB = 0;
xC = 0; yC = 10; zC = 0;
dA = 8; dB = 6; dC = 10;
alpha = 30 * pi / 180; % 目标方位角,单位为弧度
beta = 45 * pi / 180; % 目标仰角,单位为弧度
theta = 0; % 基站高度角,假设为 0
psiA = atan2(yA, xA); % 基站 A 的方位角
psiB = atan2(yB, xB); % 基站 B 的方位角
psiC = atan2(yC, xC); % 基站 C 的方位角
% 计算目标位置
x = (dA * cos(beta) * cos(alpha) + dB * cos(beta) * sin(alpha) + dC *cos(theta)) * sin(psiA) / sin(theta);
y = (dA * cos(beta) * cos(alpha) + dB * cos(beta) * sin(alpha) + dC * cos(theta)) * cos(psiA) / sin(theta);
z = dA * sin(beta) + dB * sin(beta) + dC * sin(theta);
% 输出目标位置坐标
fprintf('目标位置:(%f, %f, %f)\n', x, y, z);
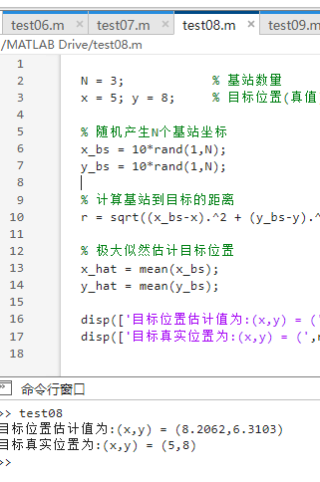
极大似然估计算方法:
极大似然估计法是一种基于测量误差的定位算法,可以用于最大化目标位置的似然函数,进而确定目标的位置。具体实现步骤如下:
确定测量误差模型:假设测量误差服从正态分布,其均值为 0,方差为 σ^2。
构造似然函数:似然函数是指在给定测量数据的情况下,目标位置的概率密度函数。假设目标位置为 (x, y),则似然函数可以表示为:
L = (1 / (2 * pi * sigma^2)^(n / 2)) * exp(-sum((d - sqrt((x - xi)^2 + (y - yi)^2))^2 / (2 * sigma^2)))
其中,n 表示基站数量,d 表示目标与各个基站之间的距离,xi 和 yi 分别表示第 i 个基站的坐标。
最大化似然函数:利用最大似然估计法,可以求出使似然函数最大化的目标位置,即最大似然估计值。可以使用 MATLAB 内置的 fminsearch 函数,在似然函数上进行最小化操作,从而得到最大似然估计值。
下面是一个 MATLAB 示例代码:
% 极大似然估计法定位算法示例
% 假设三个基站的坐标为 (0,0),(10,0) 和 (0,10),目标与三个基站的距离为 8、6 和 10,测量误差方差为 0.1
xA = 0; yA = 0;
xB = 10; yB = 0;
xC = 0; yC = 10;
dA = 8; dB = 6; dC = 10;
sigma = sqrt(0.1); % 测量误差方差
% 构造似然函数
fun = @(x) -sum(log(normpdf(sqrt((x(1)-xA)^2 + (x(2)-yA)^2), dA, sigma))) ...
-sum(log(normpdf(sqrt((x(1)-xB)^2 + (x(2)-yB)^2), dB, sigma))) ...
-sum(log(normpdf(sqrt((x(1)-xC)^2 + (x(2)-yC)^2), dC, sigma)));
% 初始值为 (5,5),使用 fminsearch 函数计算最大似然估计值
x0 = [5, 5];
x = fminsearch(fun, x0);
% 输出结果
fprintf('目标的坐标为 (%.4f, %.4f)\n', x(1), x(2));
这段代码中,首先定义了三个基站的坐标以及目标与基站的距离和测量误差方差。然后,使用匿名函数定义了似然函数,其中使用了 normpdf 函数计算每个基站测量距离与真实距离之间的概率密度函数值,并将三个基站的概率密度函数值取对数后求和。接着,定义初始值为 (5,5),使用 fminsearch 函数计算最大似然估计值,并输出结果。这里使用 fminsearch 函数是因为似然函数是凸函数,可以使用无约束优化算法求解。最后输出目标的坐标估计结果。
注意,这里的输出结果是一个估计值,由于测量误差和初始值的影响,估计结果可能存在一定误差,实际应用中需要根据具体情况进行调整和优化。
可以借鉴下
//三边测量的定位算法
//dA,dB,dC为A,B,C到未知节点(假定坐标[x,y]未知)的模拟测量距离
#include
#include
struct point_t
{
double x;
double y;
};
struct circle_t
{
struct point_t center;//圆心
double r;//半径
};
int double_equals(double const a, double const b)
{
static const double ZERO = 1e-9;
return fabs(a - b) < ZERO;
}
double distance_sqr(struct point_t const* a, struct point_t const* b)
{
return (a->x - b->x) * (a->x - b->x) + (a->y - b->y) * (a->y - b->y);
}
double distance(struct point_t const* a, struct point_t const* b)
{
return sqrt(distance_sqr(a, b));
}
double distance_pow(double x1,double y1,double x2,double y2)
{
return pow((x1-x2),2) + pow((y1-y2),2);
}
int insect(struct circle_t circles[], struct point_t points[])
{
double d, a, b, c, p, q, r;
double cos_value[2], sin_value[2];
if (double_equals(circles[0].center.x, circles[1].center.x)
&& double_equals(circles[0].center.y, circles[1].center.y)
&& double_equals(circles[0].r, circles[1].r))
{
return -1;
}
d = distance(&circles[0].center, &circles[1].center);
if (d > circles[0].r + circles[1].r
|| d < fabs(circles[0].r - circles[1].r))
{
return 0;
}
a = 2.0 * circles[0].r * (circles[0].center.x - circles[1].center.x);
b = 2.0 * circles[0].r * (circles[0].center.y - circles[1].center.y);
c = circles[1].r * circles[1].r - circles[0].r * circles[0].r
- distance_sqr(&circles[0].center, &circles[1].center);
p = a * a + b * b;
q = -2.0 * a * c;
if (double_equals(d, circles[0].r + circles[1].r)
|| double_equals(d, fabs(circles[0].r - circles[1].r))){
cos_value[0] = -q / p / 2.0;
sin_value[0] = sqrt(1 - cos_value[0] * cos_value[0]);
points[0].x = circles[0].r * cos_value[0] + circles[0].center.x;
points[0].y = circles[0].r * sin_value[0] + circles[0].center.y;
if (!double_equals(distance_sqr(&points[0], &circles[1].center),circles[1].r * circles[1].r))
{
points[0].y = circles[0].center.y - circles[0].r * sin_value[0];
}
return 1;
}
r = c * c - b * b;
cos_value[0] = (sqrt(q * q - 4.0 * p * r) - q) / p / 2.0;
cos_value[1] = (-sqrt(q * q - 4.0 * p * r) - q) / p / 2.0;
sin_value[0] = sqrt(1 - cos_value[0] * cos_value[0]);
sin_value[1] = sqrt(1 - cos_value[1] * cos_value[1]);
points[0].x = circles[0].r * cos_value[0] + circles[0].center.x;
points[1].x = circles[0].r * cos_value[1] + circles[0].center.x;
points[0].y = circles[0].r * sin_value[0] + circles[0].center.y;
points[1].y = circles[0].r * sin_value[1] + circles[0].center.y;
if (!double_equals(distance_sqr(&points[0], &circles[1].center),circles[1].r * circles[1].r))
{
points[0].y = circles[0].center.y - circles[0].r * sin_value[0];
}
if (!double_equals(distance_sqr(&points[1], &circles[1].center),circles[1].r * circles[1].r))
{
points[1].y = circles[0].center.y - circles[0].r * sin_value[1];
}
if (double_equals(points[0].y, points[1].y)&& double_equals(points[0].x, points[1].x))
{
if (points[0].y > 0)
{
points[1].y = -points[1].y;
}
else
{
points[0].y = -points[0].y;
}
}
return 2;
}
void main()
{
point_t Pab;
point_t Pbc;
point_t Pac;
point_t A;
point_t B;
point_t C;
double dA,dB,dC;
A.x = 0.0; //圆心
A.y = 0.0;
B.x = 25.0; //圆心
B.y = 25.0*sqrt(3);
C.x = 50.0; //圆心
C.y = 0.0;
dA = 51.0/sqrt(3);//半径
dB = 51.0/sqrt(3);//半径
dC = 51.0/sqrt(3);//半径
//A,B,C为三个选定的信标节点,节点坐标已知(为便于防真及验证,代码中采用的等边三角形)
//定义未知坐标x,y为符号变量
//距离方程,以信标节点为圆心,信标节点到未知节点的测量距离为半径作三个圆
struct circle_t circles_AB[2];
struct point_t points_AB[2];
circles_AB[0].center.x = A.x;
circles_AB[0].center.y = A.y;
circles_AB[0].r = dA;
circles_AB[1].center.x = B.x;
circles_AB[1].center.y = B.y;
circles_AB[1].r = dB;
switch (insect(circles_AB, points_AB))
{
case -1:
printf("THE CIRCLES ARE THE SAME\n");
break;
case 0:
printf("NO INTERSECTION\n");
break;
case 1:
printf("(%.3lf %.3lf)\n", points_AB[0].x, points_AB[0].y);
break;
case 2:
printf("求A,B两圆的交点为\n");
printf("(%.3lf %.3lf) (%.3lf %.3lf)\n",points_AB[0].x, points_AB[0].y,
points_AB[1].x, points_AB[1].y);
}
//printf("(%.3lf %.3lf %.3lf)\n", A.x, A.y,dA);
//printf("(%.3lf %.3lf %.3lf)\n", B.x, B.y,dA);
//printf("(%.3lf %.3lf %.3lf)\n", C.x, C.y,dA);
double points_AB_0 = distance_pow(points_AB[0].x,points_AB[0].y,C.x,C.y);
double points_AB_1 = distance_pow(points_AB[1].x,points_AB[1].y,C.x,C.y);
if(points_AB_0 < points_AB_1)
{
Pab.x = points_AB[0].x;
Pab.y = points_AB[0].y;
}
else
{
Pab.x = points_AB[1].x;
Pab.y = points_AB[1].y;
}
struct circle_t circles_BC[2];
struct point_t points_BC[2];
circles_BC[0].center.x = B.x;
circles_BC[0].center.y = B.y;
circles_BC[0].r = dB;
circles_BC[1].center.x = C.x;
circles_BC[1].center.y = C.y;
circles_BC[1].r = dC;
switch (insect(circles_BC, points_BC))
{
case -1:
printf("THE CIRCLES ARE THE SAME\n");
break;
case 0:
printf("NO INTERSECTION\n");
break;
case 1:
printf("(%.3lf %.3lf)\n", points_BC[0].x, points_BC[0].y);
break;
case 2:
printf("求B,C两圆的交点为\n");
printf("(%.3lf %.3lf) (%.3lf %.3lf)\n",points_BC[0].x, points_BC[0].y,
points_BC[1].x, points_BC[1].y);
}
double points_BC_0 = distance_pow(points_BC[0].x,points_BC[0].y,A.x,A.y);
double points_BC_1 = distance_pow(points_BC[1].x,points_BC[1].y,A.x,A.y);
if(points_BC_0 < points_BC_1)
{
Pbc.x = points_BC[0].x;
Pbc.y = points_BC[0].y;
}
else
{
Pbc.x = points_BC[1].x;
Pbc.y = points_BC[1].y;
}
struct circle_t circles_AC[2];
struct point_t points_AC[2];
circles_AC[0].center.x = A.x;
circles_AC[0].center.y = A.y;
circles_AC[0].r = dA;
circles_AC[1].center.x = C.x;
circles_AC[1].center.y = C.y;
circles_AC[1].r = dC;
switch (insect(circles_AC, points_AC))
{
case -1:
printf("THE CIRCLES ARE THE SAME\n");
break;
case 0:
printf("NO INTERSECTION\n");
break;
case 1:
printf("(%.3lf %.3lf)\n", points_AC[0].x, points_AC[0].y);
break;
case 2:
printf("求A,C两圆的交点为\n");
printf("(%.3lf %.3lf) (%.3lf %.3lf)\n",points_AC[0].x, points_AC[0].y,
points_AC[1].x, points_AC[1].y);
}
double points_AC_0 = distance_pow(points_AC[0].x,points_AC[0].y,B.x,B.y);
double points_AC_1 = distance_pow(points_AC[1].x,points_AC[1].y,B.x,B.y);
if(points_AC_0 < points_AC_1)
{
Pac.x = points_AC[0].x;
Pac.y = points_AC[0].y;
}
else
{
Pac.x = points_AC[1].x;
Pac.y = points_AC[1].y;
}
double P_1,P_2;
P_1 = (Pab.x + Pbc.x + Pac.x)/3.0;
P_2 = (Pab.y + Pbc.y + Pac.y)/3.0;
printf("三个圆内侧三个交点Pab,Pbc,Pac的质心为\n");
printf("(%.3lf %.3lf)\n", P_1, P_2);
}
三边测量法示例代码:
% 定义三个目标点的坐标
P1 = [0 0];
P2 = [5 0];
P3 = [0 3];
% 定义三个测距仪测得的距离
d1 = 4.5;
d2 = 5.5;
d3 = 3.2;
% 插值得到目标点的位置
P = triangulate(P1, P2, P3, d1, d2, d3);
disp(P);
function P = triangulate(P1, P2, P3, d1, d2, d3)
% 利用插值计算三个圆的交点
P12 = circleIntersect(P1, d1, P2, d2);
P13 = circleIntersect(P1, d1, P3, d3);
P23 = circleIntersect(P2, d2, P3, d3);
% 找到三个交点的平均值作为目标点
P = mean([P12; P13; P23]);
function P = circleIntersect(center1, r1, center2, r2)
% 计算两个圆的交点
d = norm(center1 - center2);
if d > r1 + r2 || d < abs(r1 - r2)
P = [];
return;
end
a = (r1^2 - r2^2 + d^2) / (2*d);
h = sqrt(r1^2 - a^2);
P2 = center1 + a/d*(center2 - center1);
x3 = P2(1) + h/d*(center2(2) - center1(2));
y3 = P2(2) - h/d*(center2(1) - center1(1));
P3 = [x3, y3];
x4 = P2(1) - h/d*(center2(2) - center1(2));
y4 = P2(2) + h/d*(center2(1) - center1(1));
P4 = [x4, y4];
if norm(P3 - P4) < 1e-6
P = P3;
else
P = [P3; P4];
end
三角测量法示例代码:
% 定义接收机的坐标
R1 = [0 0];
R2 = [0 10];
% 定义发射机的位置和方向
S1 = [5 5];
D1 = [1 2];
% 定义两个接收机接受到的信号到达发射机的时间差
t1 = 0.1;
t2 = 0.2;
% 计算发射机的位置
S = triangulate(R1, R2, S1, D1, t1, t2);
disp(S);
function S = triangulate(R1, R2, S1, D1, t1, t2)
% 计算发射机在地图坐标系下的位置坐标
D1 = D1 / norm(D1);
D2 = [-D1(2) D1(1)];
solver = [
D1(1), -D2(1), R1(1)-R2(1);
D1(2), -D2(2), R1(2)-R2(2);
] \ [t1-t2, R1(1)*D1(1)-R2(1)*D1(1)+R1(2)*D1(2)-R2(2)*D1(2)]';
S = S1 + solver(1) * D1';
可以 有需要的一起探讨一下
对于这四种定位算法,需要先了解相关原理和数学模型,然后在Matlab中实现模拟实验。我提供以下思路和代码供参考。
三边测量法
在三边测量法中,我们需要知道三个定位点的位置和自身到这三个点的距离,然后利用三角形余弦定理计算自己的位置。算法流程如下:
1)通过无线信号发射器向周围发送信号,接收器接收信号并计算发送接收时间差(Time of Flight,TOF)。
2)利用TOF计算距离。
3)将三个定位点的位置和自身到这三个点的距离传给Matlab程序,根据三角形余弦定理计算自身位置。
下面给出Matlab代码实现:
% X,Y,Z表示三个定位点的坐标
% R1,R2,R3表示自身到这三个点的距离
syms x y z
f1 = (x - X(1))^2 + (y - Y(1))^2 + (z - Z(1))^2 - R1^2
f2 = (x - X(2))^2 + (y - Y(2))^2 + (z - Z(2))^2 - R2^2
f3 = (x - X(3))^2 + (y - Y(3))^2 + (z - Z(3))^2 - R3^2
[x, y, z] = solve(f1,f2,f3)
三角测量法
在三角测量法中,我们需要通过三个定位点的角度和自身到这三个点的距离,计算自身位置。算法流程如下:
1)通过无线信号发射器向周围发送信号,接收器接收信号并计算在垂直于接收器方向上的到达时间(Time Difference of Arrival,TDOA)。
2)利用TDOA计算角度。
3)利用三角函数计算自身当前位置。
下面给出Matlab代码实现:
% X1,Y1,X2,Y2,X3,Y3表示三个定位点的坐标
% az12,az32,elevation12,elevation23表示自身和每对定位点间的角度
% R1,R2,R3表示自身到三个定位点的距离
syms x y z
f1 = (x - X1)^2 + (y - Y1)^2 + (z - Z1)^2 - R1^2
f2 = (x - X2)^2 + (y - Y2)^2 + (z - Z2)^2 - R2^2
f3 = (x - X3)^2 + (y - Y3)^2 + (z - Z3)^2 - R3^2
[x, y, z] = solve(f1,f2,f3)
% 计算自身与每对定位点之间的角度
az13 = atan2(Y3 - Y1, X3 - X1)
az12 = atan2(Y2 - Y1, X2 - X1)
az32 = atan2(Y2 - Y3, X2 - X3)
elevation13 = atan2(Z3 - Z1, sqrt((X3 - X1)^2 + (Y3 - Y1)^2))
elevation12 = atan2(Z2 - Z1, sqrt((X2 - X1)^2 + (Y2 - Y1)^2))
elevation23 = atan2(Z3 - Z2, sqrt((X3 - X2)^2 + (Y3 - Y2)^2))
% 利用三角函数计算自身位置
cos1 = sin(elevation23) * sin(elevation13) * cos(az32 - az13) + cos(elevation13) * cos(elevation23)
cos2 = sqrt((X2 - X1)^2 + (Y2 - Y1)^2 + (Z2 - Z1)^2) / sqrt((X3 - X1)^2 + (Y3 - Y1)^2 + (Z3 - Z1)^2)
cos3 = (sin(elevation13) * sin(elevation12) * cos(az13 - az12) - cos(elevation13) * cos(elevation12)) / cos1
x = X1 + cos3 * sqrt((X2 - X1)^2 + (Y2 - Y1)^2 + (Z2 - Z1)^2)
y = Y1 + cos3 * sqrt((X2 - X1)^2 + (Y2 - Y1)^2 + (Z2 - Z1)^2)
z = Z1 + sin(elevation13) *
极大似然估计法
极大似然估计法是通过最大化接收信号与预测信号之间的相关系数,来计算自身位置的算法。算法流程如下:
1)通过无线信号发射器向周围发送信号,接收器接收信号。
2)利用接收信号和预测信号之间的相关系数,计算自身位置。
下面给出Matlab代码实现:
% signal1, signal2, signal3表示来自三个定位点的接收信号
% x,y,z表示自身位置
x0 = [x;y;z];
% 定义最小化目标函数
fun = @(x) -abs(corr(signal1, predict_signal(x,X1,Y1,Z1))) - abs(corr(signal2, predict_signal(x,X2,Y2,Z2))) - abs(corr(signal3, predict_signal(x,X3,Y3,Z3)));
options = optimoptions('fmincon','Display','off');
[x, fval] = fmincon(fun, x0, [], [], [], [], [], [], [], options);
% 定义预测信号函数
function signal = predict_signal(pos,X,Y,Z)
% A为到每个发射器的距离,C为无人机朝向(假设方向为0°)
A = [sqrt((X(1)-pos(1))^2 + (Y(1)-pos(2))^2 + (Z(1)-pos(3))^2) sqrt((X(2)-pos(1))^2 + (Y(2)-pos(2))^2 + (Z(2)-pos(3))^2) sqrt((X(3)-pos(1))^2 + (Y(3)-pos(2))^2 + (Z(3)-pos(3))^2)];
C = [0;0;0];
% 计算余弦
cos_phi = sum(A.^2 - C.^2,2)./(2*prod(A,2));
% 计算预测信号
signal = cos_phi;
end
最小最大法
最小最大法是通过计算距离最短的三个定位点,并以距离最远的点为峰值,来计算自身位置的算法。算法流程如下:
1)通过无线信号发射器向周围发送信号,接收器接收信号并计算距离。
2)计算距离最小的三个定位点,并以距离最远的点的位置为峰值。
下面给出Matlab代码实现:
% X,Y,Z表示所有定位点的坐标
% R表示到所有定位点的距离
[sorted,index] = sort(R);
pos1 = [X(index(1)) Y(index(1)) Z(index(1))];
pos2 = [X(index(2)) Y(index(2)) Z(index(2))];
pos3 = [X(index(3)) Y(index(3)) Z(index(3))];
p1 = sqrt(sum((pos1 - pos2).^2));
p2 = sqrt(sum((pos1 - pos3).^2));
p3 = sqrt(sum((pos2 - pos3).^2));
if p1 > p2 && p1 > p3 % 找到距离最远的峰值
x = (pos1 + pos2) / 2; % 计算自身位置
elseif p2 > p1 && p2 > p3
x = (pos1 + pos3) / 2;
else
x = (pos2 + pos3) / 2;
end
1.三边测量法

2.三角测量法
3.极大似然估计法
4.最小最大法
