用stm32实现传感器模拟
通过stm32单片机实现陀螺仪和星敏传感器的通信协议,通信协议都是已经写好的
价格可议
你好,stm32单片机实现陀螺仪和星敏传感器,这是要是实现底层代码驱动么,你可以参考一些博客来完成你的需求
https://blog.csdn.net/Fred_1986/article/details/108290187
https://blog.csdn.net/weixin_43793181/article/details/109250190
好的,如果通信协议已经写好,那么你需要在STM32单片机上实现协议的解析和数据处理。具体步骤如下:
确定通信接口:根据通信协议确定使用哪种通信接口,比如UART、SPI、I2C等。
配置通信接口:根据通信协议和通信接口的要求,配置STM32单片机的通信接口,包括波特率、数据位、停止位、校验位等参数。
解析通信协议:根据通信协议的格式,解析接收到的数据包,提取出需要的数据。
数据处理:根据需要,对提取出的数据进行处理,比如进行滤波、校准、转换等操作。
发送数据:根据通信协议的要求,将处理后的数据打包成数据包,通过通信接口发送出去。
需要注意的是,通信协议的解析和数据处理需要根据具体的协议和传感器类型进行编写,具体的实现方式可能会有所不同。
STM32F030读取TMP275温度传感器,模拟iic。
可以借鉴下
#include "delay.h"
static uint16_t fan_us=0;
static uint16_t fan_ms=0;
void Delay_Init()
{
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
fan_us=SystemCoreClock/8000000;
fan_ms=(uint16_t)fan_us * 1000;
}
void Delay_Us(uint16_t time)
{
uint32_t temp=0;
SysTick->VAL=0x00;
SysTick->LOAD=(uint32_t)time*fan_us;
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk;
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(0x01<<16)));
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk;
SysTick->VAL=0x00;
}
void Delay_Ms(uint16_t time)
{
uint32_t temp=0;
SysTick->VAL=0x00;
SysTick->LOAD=(uint32_t)time*fan_ms;
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk;
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(0x01<<16)));
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk;
SysTick->VAL=0x00;
}
该回答通过自己思路及引用到GPTᴼᴾᴱᴺᴬᴵ搜索,得到内容具体如下:
要使用STM32单片机实现陀螺仪和星敏传感器的通信协议,您需要按照以下步骤进行操作:
1. 首先,您需要选择适合您的STM32单片机的开发板或自行设计电路板。您需要确保开发板上有足够的IO口(用于连接传感器)和串口(用于与计算机通信)。
2. 下一步是编写STM32单片机的程序。您需要使用C语言或汇编语言编写程序。程序需要包括与传感器通信的协议和数据处理代码。通信协议可能是串行通信(例如UART)或并行通信(例如SPI)。您需要在数据处理代码中解析传感器发送的数据,并将其转换为可读的格式。
3. 在编写程序之前,您需要了解传感器的通信协议和通信格式。陀螺仪和星敏传感器通常使用标准的串行通信协议(如UART或SPI)进行通信。您需要查阅传感器的数据手册,以了解传感器的通信协议和通信格式。
4. 编写程序后,您需要将程序下载到STM32单片机上。您可以使用ST-Link调试器或其他类似的调试器进行下载。在下载程序之前,您需要确保STM32单片机的固件已正确配置。
5. 测试程序。您需要将传感器连接到STM32单片机上,并使用计算机或其他设备读取传感器数据。您可以使用串口调试工具或其他类似的软件来读取传感器数据。如果程序编写正确,则您应该能够正确地读取传感器数据。
需要注意的是,在实现陀螺仪和星敏传感器的通信协议时,您需要仔细阅读传感器的数据手册,并确保程序编写正确。如果您遇到问题,可以参考STM32单片机的官方文档或社区论坛,或者向相关专业人士寻求帮助。
如果以上回答对您有所帮助,点击一下采纳该答案~谢谢
- 这有个类似的问题, 你可以参考下: https://ask.csdn.net/questions/7660726
- 你也可以参考下这篇文章:通过STM32单片机计算并控制小车速度,通过控制速度的思想扩展到控制其它变化量
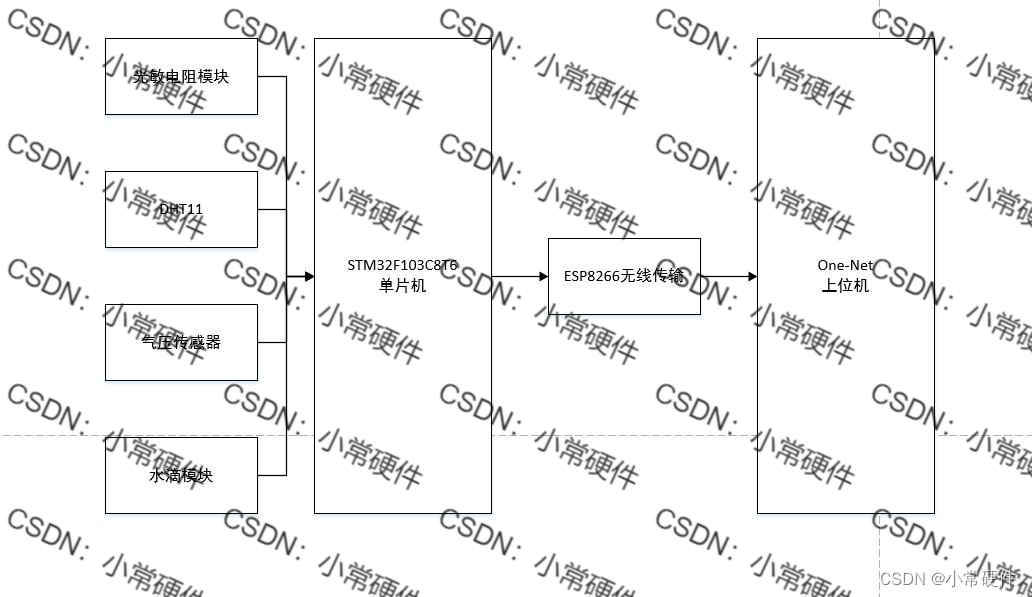
- 除此之外, 这篇博客: STM32单片机开发实例 基于STM32单片机的温室大棚监测系统中的 一、系统设计 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
通过STM32单片机进行主控,通过光敏电阻模块进行大棚内的光照强度的采集,通过DHT11数字温湿度传感器进行温湿度的采集,通过气压模块进行大棚气压强度的采集,通过水滴模块进行土壤湿度的采集,采集的数据在单片机处理后会通过无线模块ESP8266上传到One-Net上位机端进行显示。
- 您还可以看一下 朱辉老师的stm32嵌入式开发实战入门与提高课程中的 stm32单片机开发环境搭建小节, 巩固相关知识点
以下答案由GPT-3.5大模型与博主波罗歌共同编写:
实现陀螺仪和星敏传感器的通信协议需要遵循传感器厂商提供的通信协议文档。一般来说,通信协议可以分为硬件层面和软件层面两个部分。
硬件层面包括连接方式及信号电平、时序等方面。传感器一般通过SPI或I2C总线进行通信,需要根据厂商提供的接口引脚进行连接,同时需要设置好通信时钟、数据位宽等参数,这一部分的具体实现要根据具体的传感器型号和STM32开发板型号进行选择。
软件层面包括通信协议的控制、数据解析、校验等方面。需要根据厂商提供的协议文档编写对应的代码。对于STM32开发板,可以使用HAL库提供的函数进行SPI或I2C的数据传输,同时使用C语言代码进行数据解析和校验。
以下是使用STM32 HAL库进行SPI通信的示例代码,仅供参考:
#include "stm32f4xx_hal.h"
#include "spi.h"
SPI_HandleTypeDef hspi2;
void SPI_Init(void)
{
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_64;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
HAL_SPI_Init(&hspi2);
}
void SPI_Transfer(uint8_t* buffer, uint16_t size)
{
HAL_SPI_TransmitReceive(&hspi2, buffer, buffer, size, 10);
}
假设陀螺仪或星敏传感器的输出数据为一个16位字节,可以使用以下C语言代码进行数据解析:
#define DATA_SIZE 16
uint8_t data_buffer[DATA_SIZE];
void Process_Data(void)
{
int16_t data_x, data_y, data_z;
// Check the header byte
if (data_buffer[0] != 0x55) {
return;
}
// Check the check sum byte
uint8_t sum = 0;
for (int i = 0; i < DATA_SIZE - 1; ++i) {
sum += data_buffer[i];
}
if (sum != data_buffer[DATA_SIZE - 1]) {
return;
}
// Parse the data
data_x = (data_buffer[2] << 8) | data_buffer[1];
data_y = (data_buffer[4] << 8) | data_buffer[3];
data_z = (data_buffer[6] << 8) | data_buffer[5];
// Do something with the data
// ...
}
以上代码仅为示例,具体实现需要根据具体的传感器型号和通信协议文档进行调整。
如果我的回答解决了您的问题,请采纳!
以下答案由GPT-4.5Plus大模型(语音)与博主A努力中.......共同编写:
实现stm32与陀螺仪和星敏传感器通信,主要需要以下步骤:
- 配置串口通信参数。这包括波特率、数据位、停止位等。需要与传感器通信协议匹配。
- 配置外设时钟。陀螺仪和星敏传感器通常使用I2C或SPI总线通信,需要配置相应的时钟源。
- 配置I2C或SPI总线。这包括SCL/SDA引脚(I2C)或SCLK/MOSI/MISO/CS引脚(SPI)的映射、速率等。
- 配置中断服务函数。如果使用中断读取数据,需要配置中断触发条件和中断服务函数。
- 初始化传感器。根据数据手册,向传感器发送初始化命令,配置工作模式、测量范围等参数。
- 读取传感器数据。可以通过轮询或中断方式读取数据,然后解析原始数据得到有意义的测量值。
- 处理传感器数据。对读取的数据进行处理、滤波、校准等,得到准确的测量结果。
所以,您需要根据具体的通信协议和传感器手册,逐步实现上述功能。主要工作有:
- 查看通信协议和传感器手册,理解初始化、配置命令和数据读取格式。
- 配置STM32的串口、I2C/SPI总线等外设使其与传感器匹配。
- 发送初始化命令配置传感器,并校验配置是否成功。
- 编写数据读取函数,通过轮询或中断不断读取传感器输出的数据。
- 对读取的数据进行处理,实现传感器测量功能。
- 测试通信并读取传感器数据,验证功能实现是否正确。
这就是stm32实现与陀螺仪和星敏传感器通信的基本过程。关键是深入理解通信协议和传感器工作原理,并将其转化为STM32的代码实现。