单闭环直流调速系统的simulink电枢电流Id
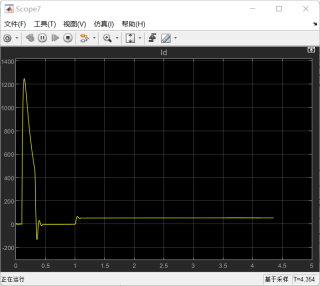
为什么我仿真出来的Id会先变成0然后又增加一个值啊?
以下内容部分参考ChatGPT模型:
根据你提供的信息,我理解你在单闭环直流调速系统的Simulink模型中检查电枢电流Id的变化。如果你的Id信号的值先变成0,然后又增加一个值,这可能是由于控制器的反馈信号导致的。
为了解决这个问题,你可以检查控制器的反馈信号是否正确。如果反馈信号不正确,将会导致控制器输出的值不稳定。你也可以检查你的模型是否正确设置了初始条件。
下面是一个简单的单闭环直流调速系统的Simulink模型示例,其中包含电机、电机控制器和直流电源:
model DC_motor_control
% 模型参数
parameter R = 1;
parameter L = 0.1;
parameter J = 0.01;
parameter b = 0.1;
% 控制器参数
parameter Kp = 1;
parameter Ki = 0.1;
parameter Kd = 0.01;
% 直流电源参数
parameter V = 12;
% 模型输入信号
input V_ref;
% 模型输出信号
output w;
% 模型变量
variable i;
variable e;
% 电机模型
i_dot = (V - R*i - e)/L;
w_dot = (Kt*i - b*w)/J;
% 控制器模型
e = V_ref - w;
u = Kp*e + Ki*int(e) + Kd*diff(e);
% 直流电源模型
V = u;
% 输出信号
w = w;
end DC_motor_control;
这个模型包含一个电机模型、一个控制器模型和一个直流电源模型。你可以在模型中添加一个Scope来查看电枢电流Id的变化情况。