单片机中断任务改进实验
利用C语言知识,在任务六的基础上改进
改进要求

任务六代码已写好
以下内容部分参考ChatGPT模型:
思路:
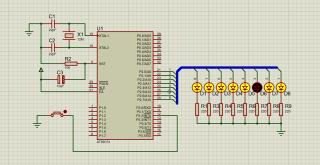
首先需要明确改进的要求,即要在任务六的基础上进行改进。从任务六代码中可以看出,该任务实现了外部中断0的功能,即当外部中断0引脚(P3.2)有信号变化时,会执行中断服务函数int0()。
针对该任务的改进可以有多种方式,以下是其中一种:
- 在int0()函数中添加一个计数器,每触发一次中断,计数器加1。
- 在主函数中添加一个定时器中断,每隔一段时间检查一下计数器的值,如果计数器的值为偶数,则控制LED1亮,否则灭。
具体实现过程如下:
在int0()函数中添加一个计数器count,并在每次中断服务函数执行时将count加1:
void int0() interrupt 0 { count++; }在主函数中初始化定时器,并开启定时器中断。这里以定时器0为例,每1秒钟触发一次中断:
void init_timer0() { TMOD |= 0x01; // Timer0使用模式1 TH0 = 0xFC; // 定时1s TL0 = 0x18; ET0 = 1; // 开启定时器0中断 TR0 = 1; // 启动定时器0 } void timer0() interrupt 1 { if (count % 2 == 0) { // 如果count为偶数,则LED1亮 LED1 = 1; } else { // 否则LED1灭 LED1 = 0; } } void main() { init_timer0(); // 初始化定时器0 IE = 0x81; // 开启中断,允许外部中断0和定时器0中断 while (1); }在主函数中开启中断,并在while循环中等待中断的触发。
最终的代码如下:
#include <reg52.h> sbit LED1 = P0^0; // LED1的控制引脚 sbit INT0 = P3^2; // 外部中断0引脚 unsigned int count = 0; // 计数器 void init_timer0() { TMOD |= 0x01; // Timer0使用模式1 TH0 = 0xFC; // 定时1s TL0 = 0x18; ET0 = 1; // 开启定时器0中断 TR0 = 1; // 启动定时器0 } void timer0() interrupt 1 { if (count % 2 == 0) { // 如果count为偶数,则LED1亮 LED1 = 1; } else { // 否则LED1灭 LED1 = 0; } } void int0() interrupt 0 { count++; } void main() { init_timer0(); // 初始化定时器0 IE = 0x81; // 开启中断,允许外部中断0和定时器0中断 while (1); }
如果我的建议对您有帮助、请点击采纳、祝您生活愉快
- 这有个类似的问题, 你可以参考下: https://ask.csdn.net/questions/7804871
- 这篇博客你也可以参考下:单片机C语言实现呼吸灯代码,中断执行
- 除此之外, 这篇博客: 这是我看过最全面讲解嵌入式C语言回调函数和函数指针的教程中的 函数指针结构体 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
但是很多时候我们一般在结构体中定义函数指针用的比较多一点。下面再举一个简单的例子。
#include "sys.h" #include "led.h" #include "delay.h" #include "usart.h" /**************************************** * 函数指针结构体 开发者写的结构体 ***************************************/ typedef struct { uint8_t (*p_sum)(uint8_t, uint8_t); uint8_t (*p_sub)(uint8_t, uint8_t); uint8_t (*p_mul)(uint8_t, uint8_t); float (*p_div)(uint8_t, uint8_t); } Operation_T; /*声明结构体变量g_Operation*/ Operation_T g_Operation; /*使用者写的回调函数*/ uint8_t cal_sum(uint8_t a, uint8_t b) { return a + b; } /*使用者写的回调函数*/ uint8_t cal_sub(uint8_t a, uint8_t b) { return a - b; } /*使用者写的回调函数*/ uint8_t cal_mul( uint8_t a, uint8_t b) { return a * b; } /*使用者写的回调函数*/ float cal_div(uint8_t a, uint8_t b) { return a / b; } /*结构体变量g_Operation初始化*/ Operation_T g_Operation = {cal_sum, cal_sub, cal_mul, cal_div}; int main(void) { delay_init(); uart_init(9600); printf("www.zhiguoxin.cn\r\n"); printf("微信公众号:果果小师弟\r\n"); uint8_t a = 10; uint8_t b = 8; /*使用函数指针调用函数*/ printf("%d\r\n", g_Operation.p_sum(a, b)); printf("%d\r\n", g_Operation.p_sub(a, b)); printf("%d\r\n", g_Operation.p_mul(a, b)); printf("%f\r\n", g_Operation.p_div(a, b)); while(1) { } }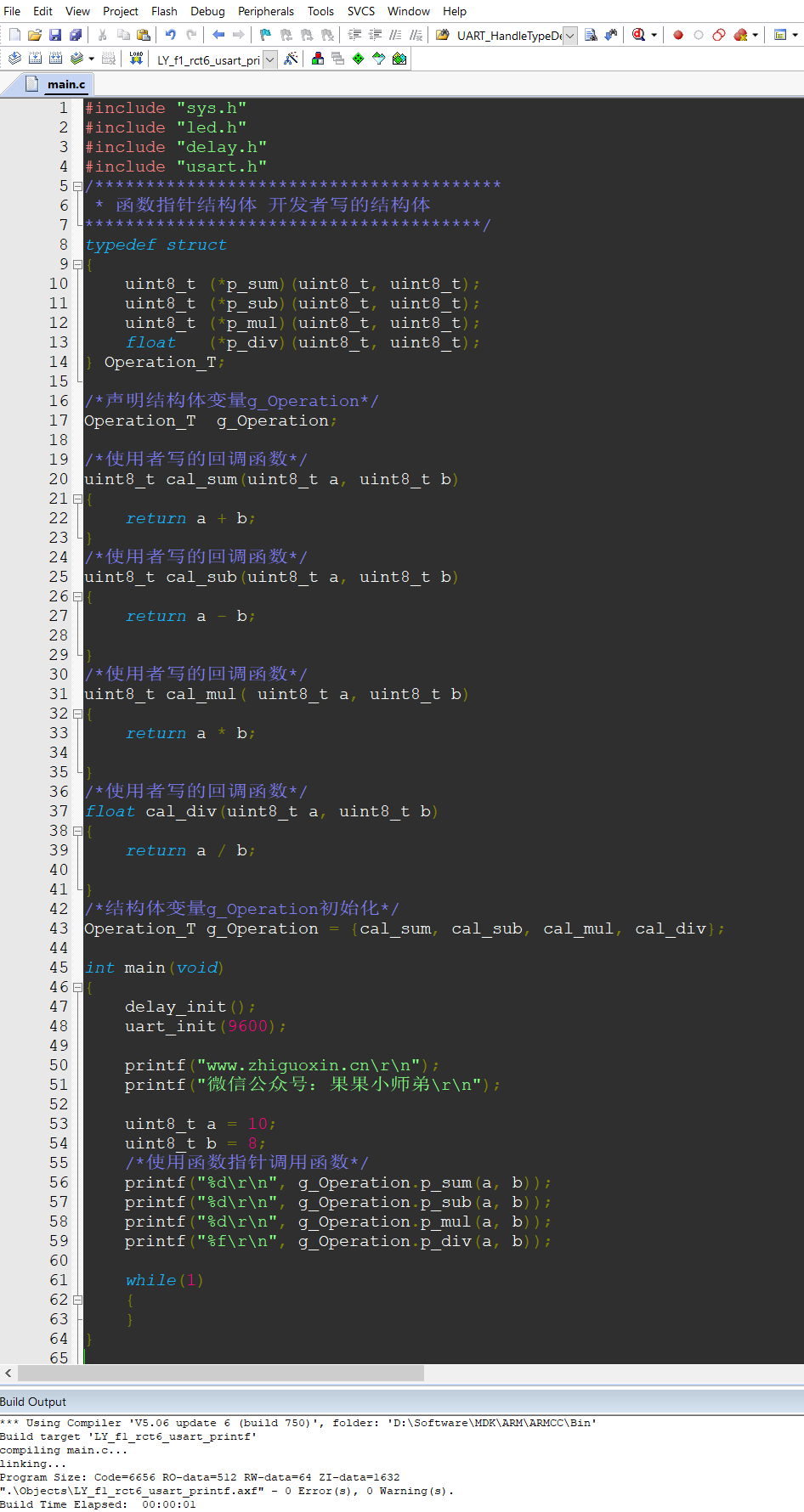

- 您还可以看一下 Abel小智老师的嵌入式开发系统学习路线 从基础到项目 精品教程 工程师必备课程 物联网课程中的 C语言开发基础介绍小节, 巩固相关知识点