单片机汇编用一片74hc164实现四个数码管的动态显示
用一个74hc164实现数码管的动态显示0-9,使用串口传输
不知道你这个问题是否已经解决, 如果还没有解决的话:- 你可以看下这个问题的回答https://ask.csdn.net/questions/7801397
- 这篇博客你也可以参考下:51单片机实现并转串(74HC165)、串转并(74HC595)功能遇到的问题及解决方法
- 除此之外, 这篇博客: 74HC595驱动数码管显示模块使用说明中的 四. 4位数码管模块使用 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
电路图如下所示,图中是8位数码管的电路图,与4位相似,都具有两片595驱动芯片,两片595级联在一起,第二片595(U4)是对数码管的8段码进行段码操作,第一片595(U3)是对8位数码管进行位选操作,即选择哪一个数码管进行显示操作。
虽然595具有存储寄存器,但是只能对一位数码管的数据进行数据锁存。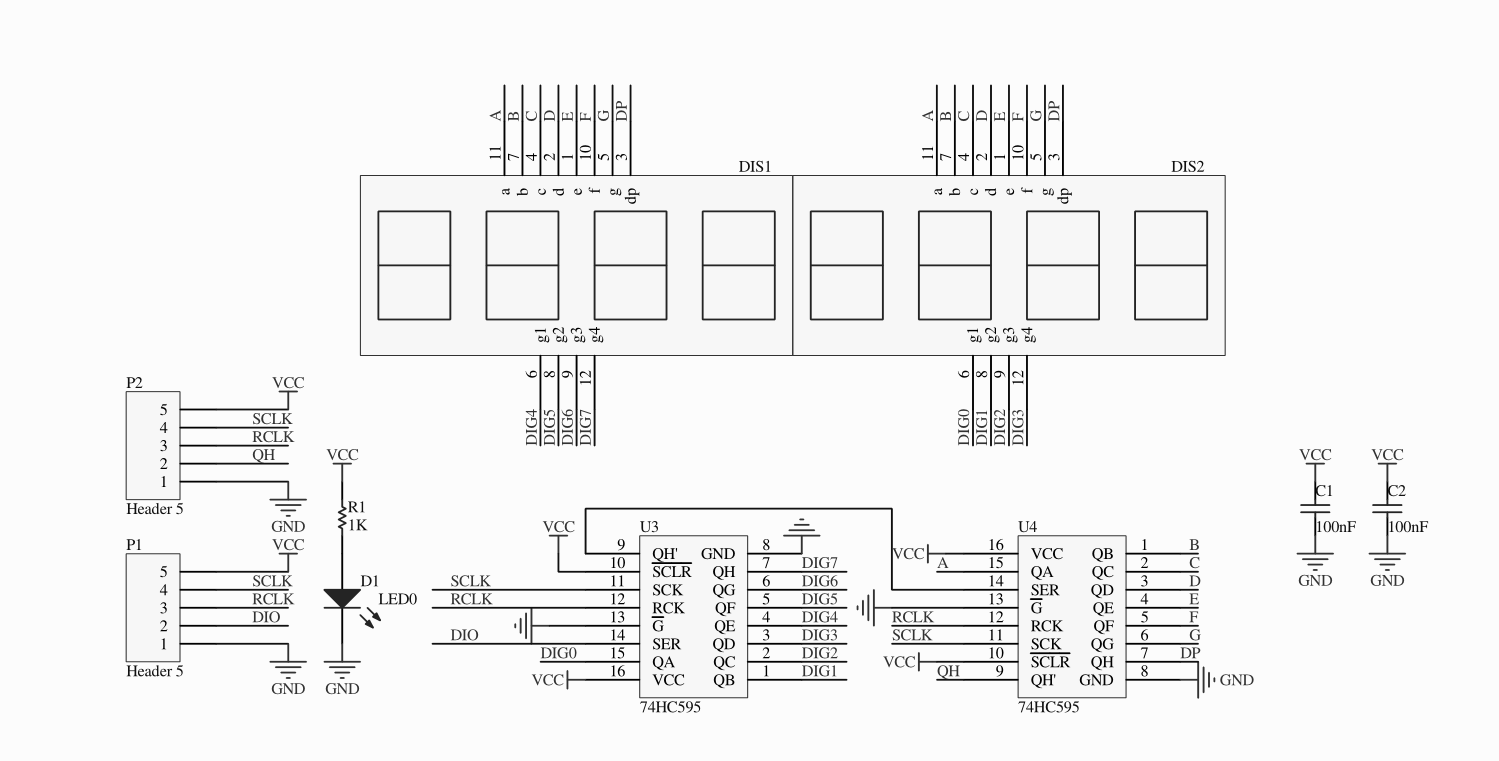
代码如下,基于STM32F407/* *PB4...........DIO *PB5...........RCLK *PB6...........SCLK */ #define DIO PBout(4) //串行数据输入 #define RCLK PBout(5) //存储寄存器 锁存控制信号(上升沿有效) #define SCLK PBout(6) //移位寄存器 时钟脉冲信号(上升沿有效) void HC595_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOG的时钟 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;//输出 GPIO_InitStructure.GPIO_OType=GPIO_OType_PP; //推挽输出 GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_DOWN; //下拉输出 GPIO_InitStructure.GPIO_Speed=GPIO_Speed_100MHz; //高速GPIO GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_ResetBits(GPIOB,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6); } u8 LED_table[18]={ //01234567 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8, //89ABCDEF 0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E, //熄灭- 0xFF,0xBF}; //共阳数码管段码“0123456789AbCdEF熄灭-” u8 wei_table[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; //第一位至第八位位码 /****************************************************************/ //数码动态显示函数LED8_Display(),有形参x和y,无返回值 //x表示位选择,y表示欲显示的数码 /****************************************************************/ void LED8_Display(u8 x,u8 y) { LED_OUT(LED_table[y]);//送出段码 LED_OUT(wei_table[x]);//送出位码 RCLK=0; RCLK=1;//RCLK产生上升沿 delay_ms(1); } /****************************************************************/ //单字节数据串行移位函数LED_OUT(),有形参outdata用于传入实际数据 //无返回值 /****************************************************************/ void LED_OUT(u8 outdata) { u8 i; for(i=0;i<8;i++)//循环8次 { if (outdata & 0x80)//逐一取出最高位 1000 0000 b DIO=1;//送出“1” else DIO=0;//送出“0” outdata<<=1;//执行左移一位操作 SCLK=0; SCLK=1;//SCLK产生上升沿 } } int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 uart4 2/3 usart1 3/3 Usart2 2/0 uart5 2/1 delay_init(168); //初始化延时函数 uart_init(115200);//初始化串口波特率为115200 HC595_Init(); while(1) { LED8_Display(0,8); LED8_Display(1,7); LED8_Display(2,6); LED8_Display(3,5); //// while(1) //// { ////// delay_ms(100); //// } } }
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^