stm32循迹小车怎么过分叉路
stm32循迹小车怎么过分叉路,过分叉路时在两个红外装置之间来回反复识别,然后小车就开始抽搐了
不知道你这个问题是否已经解决, 如果还没有解决的话:- 这有个类似的问题, 你可以参考下: https://ask.csdn.net/questions/357969
- 我还给你找了一篇非常好的博客,你可以看看是否有帮助,链接:单片机STM32死机问题分析及解决方案总结
- 除此之外, 这篇博客: 如何使用STM32开发板做一个自动感应垃圾桶中的 一、所用到的软件和硬件 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
软件:
使用的KEIL 和STM32CUBE MX
STM32CUBE MX简直小白福音,如果对于STM32配置不是很清楚的话,又想尝试STM32芯片的开发的话,可以尝试使用这一个软件,这个可以想图形一样的点点就配置成功了。
硬件:
STM32F103ZET6的开发板、一个单刀单掷的继电器、一个双刀双掷的继电器、一个红外线感应模块、一个光电开关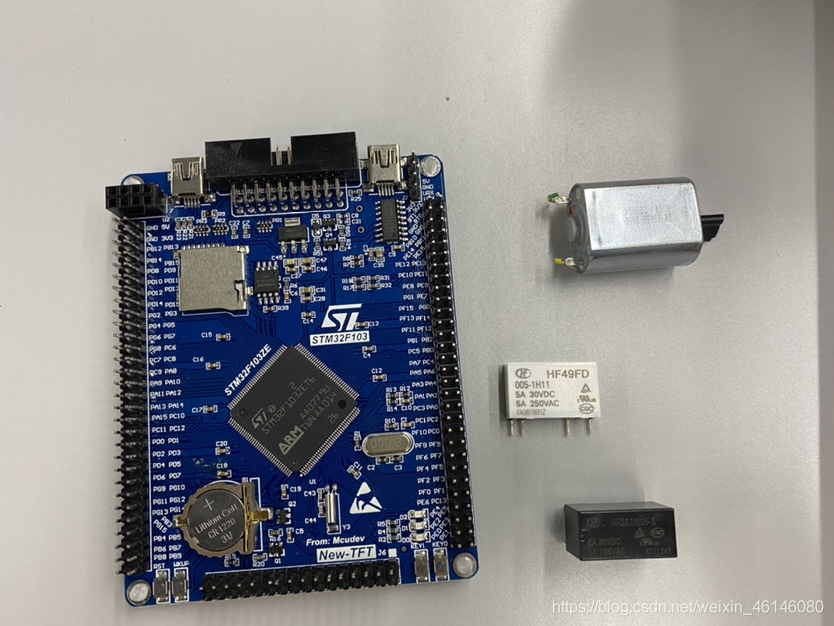
上图少了红外线模块和光电开关
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^
对于STM32循迹小车过分叉路的问题,可以采取以下两种方法:
提高红外传感器的精度和灵敏度:在过分叉路时,红外传感器需要能够准确地识别车道,并及时反馈给控制器。如果红外传感器的精度和灵敏度不够高,就容易出现抖动和误识别的情况。可以通过调整传感器的位置、角度和距离,以及优化传感器的电路和算法等方式来提高传感器的性能。
使用多种传感器进行识别:除了红外传感器外,还可以使用其他类型的传感器,比如超声波传感器、激光雷达等,来对车道进行识别和定位。多种传感器的融合可以提高识别的准确性和鲁棒性,从而避免车辆在过分叉路时抖动和漂移的情况。
另外,如果小车在过分叉路时出现抽搐的情况,可能是由于控制器的程序设计问题或者电机驱动问题引起的。可以通过调整程序逻辑、增加控制策略或者优化电机驱动等方式来解决问题。如果问题比较复杂,建议请专业的工程师进行诊断和解决。