无人机px4下载环境编译出错,如何解决?

PX4无法定位软件包,找不到有效openPGP,搭建环境一直出错,有没有同志们能帮我解决一下
以下答案由GPT-3.5大模型与博主波罗歌共同编写:
解决PX4下载环境编译出错的方法如下:
1.确认软件包无法定位
首先,确认您是否已经正确的设置了PX4下载环境。如果已经正确设置了环境,请运行以下命令,以确认软件包是否可以被定位到:
make list_target_configs
如果无法找到软件包,则需要安装openPGP才能继续。
2.下载和安装openPGP
使用以下命令来下载和安装openPGP:
sudo apt-get install openpgp
安装完成后,请重新运行make list_target_configs。你应该现在可以看到像此类的输出:
Supported configurations:
qflight
qflight-v2
qflight-v3
sitl
px4fmu-v1-default
px4fmu-v2-default
px4fmu-v2-mag
px4fmu-v2-companion
px4fmu-v2-pixhawk1
…
3.编译PX4
确保软件包被正确地定位到,并且openPGP已经被成功的安装,运行以下命令编译PX4:
make px4_sitl gazebo
PX4将会在编译过程中进行下载和安装各种依赖项。在编译完成之后,你应该可以启动PX4。
如果出现依赖项导致编译失败的情况,运行以下命令以安装所需的依赖项:
sudo apt-get install python-rosinstall-generator python-wstool
如果我的回答解决了您的问题,请采纳!
该回答引用ChatGPT根据问题描述,可能是缺少GPG密钥或者网络问题导致无法下载软件包。解决方法如下:
1. 检查网络连接是否正常,可以尝试使用ping命令测试网络连接。
2. 检查GPG密钥是否正确,可以使用以下命令导入PX4的GPG密钥:
curl https://raw.githubusercontent.com/PX4/px4tools/master/setup/ubuntu.sh | bash
3. 如果以上方法都无法解决问题,可以尝试手动下载软件包并安装。可以使用以下命令下载软件包:
git clone https://github.com/PX4/Firmware.git
然后进入Firmware目录,使用以下命令编译:
make px4_fmu-v5_default
如果编译成功,可以使用以下命令烧录固件:
make px4_fmu-v5_default upload
如果编译失败,可以查看编译日志,找出具体的错误信息并进行修复。
另外,建议使用最新版本的PX4固件和工具链,以获得更好的兼容性和稳定性。该回答引用ChatGPT
根据问题描述,可能是缺少GPG密钥或者网络问题导致无法下载软件包。解决方法如下:
1. 检查网络连接是否正常,可以尝试使用ping命令测试网络连接。
2. 检查GPG密钥是否正确,可以使用以下命令导入PX4的GPG密钥:
curl https://raw.githubusercontent.com/PX4/px4tools/master/setup/ubuntu.sh | bash
3. 如果以上方法都无法解决问题,可以尝试手动下载软件包并安装。可以使用以下命令下载软件包:
git clone https://github.com/PX4/Firmware.git
然后进入Firmware目录,使用以下命令编译:
make px4_fmu-v5_default
如果编译成功,可以使用以下命令烧录固件:
make px4_fmu-v5_default upload
如果编译失败,可以查看编译日志,找出具体的错误信息并进行修复。
另外,建议使用最新版本的PX4固件和工具链,以获得更好的兼容性和稳定性。
根据你提供的错误,错误一是说无法定位软件包openjdk-14-jdk的问题,说明没有检测到openjdk,请检查是否安装了openjdk,以及是否配置了环境变量,还有就是版本的问题。
错误二是说找不到有效的 OpenPGP,解决方法是:
wget https://download.docker.com/linux/ubuntu/gpg
sudo apt-key add gpg
- 建议你看下这篇博客👉 :PX4学习笔记—通过串口发送自定义数据
- 除此之外, 这篇博客: PX4装机教程(一)多旋翼中的 4.校准地平线 部分也许能够解决你的问题, 你可以仔细阅读以下内容或者直接跳转源博客中阅读:
如果不校准地平线,无人机在非定点飞行中位置可能持续的漂移。
将无人机置于水平面上,点击校平地平线->OK,然后保持静止,直到绿色进度条满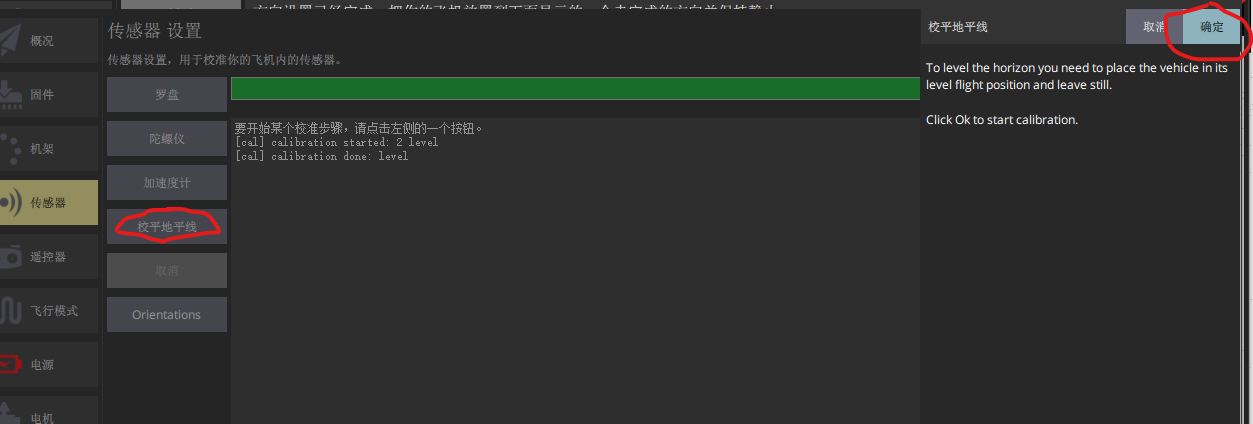
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^