利用如下条件,如何绘制线形阵列传感器的仿真结果图
问题:利用如下条件,如何绘制仿真结果三维图?
条件:在仿真环境中,设置电气设备外壳的尺寸为:长150cm,宽120cm,高100cm,其分别对应坐标系的X轴、Y轴、Z轴局放源位置为(60、60、60)cm,超声阵列传感器的耦合位置分别为:1(40,0,0)cm、2(80,0,0)cm、3(0,30,0)cm、4(0,90,0)cm。根据局放源的位置和传感器的耦合位置可以得到其对应的超声9元阵列传感器耦合位置的方位角和俯仰角的理论值分别为:(76.7°,46.5°)、(103.3°,46.5。)、(70.5°,48.2°)、(109.5°,48.2°)。
声源信号条件:
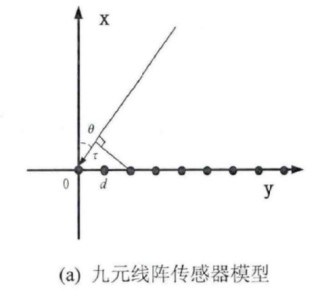
一维线阵模型:
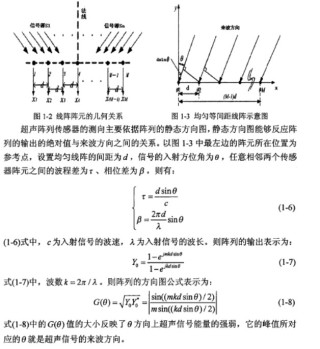
超声阵列信号测向原理:

一维线型阵列传感器测向原理:
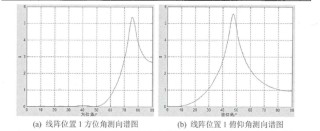
仿真结果图:
看看这个 是不是你想要的
这个你可以将你的三维数据输入矩阵,绘制的就是三维的。
此回答引自chatGpt
根据给出的条件,可以将仿真结果绘制成一个三维图,其中X轴表示长度,Y轴表示宽度,Z轴表示高度,局放源和超声阵列传感器的位置可以表示为三维坐标点。可以使用MATLAB的三维绘图函数scatter3绘制这个图。
以下是一个可能的MATLAB代码示例:
% 设置电气设备外壳尺寸
length = 150;
width = 120;
height = 100;
% 设置局放源位置和传感器耦合位置
source_pos = [60, 60, 60];
sensor_pos = [40, 0, 0; 80, 0, 0; 0, 30, 0; 0, 90, 0];
% 设置局放源和传感器的理论方位角和俯仰角
theta = [76.7, 103.3, 70.5, 109.5];
phi = [46.5, 46.5, 48.2, 48.2];
% 绘制电气设备外壳
figure
[X, Y, Z] = meshgrid([0, length], [0, width], [0, height]);
box = surf(X, Y, Z);
box.FaceAlpha = 0.2;
box.EdgeColor = 'none';
hold on
% 绘制局放源和传感器
scatter3(source_pos(1), source_pos(2), source_pos(3), 100, 'r', 'filled')
for i = 1:size(sensor_pos, 1)
scatter3(sensor_pos(i, 1), sensor_pos(i, 2), sensor_pos(i, 3), 50, 'b', 'filled')
end
% 绘制局放源和传感器理论位置
for i = 1:size(sensor_pos, 1)
x = source_pos(1) + cosd(phi(i)) * cosd(theta(i));
y = source_pos(2) + cosd(phi(i)) * sind(theta(i));
z = source_pos(3) + sind(phi(i));
line([source_pos(1), x], [source_pos(2), y], [source_pos(3), z], 'Color', 'g', 'LineStyle', '--')
end
% 设置坐标轴标签和标题
xlabel('Length (cm)')
ylabel('Width (cm)')
zlabel('Height (cm)')
title('Simulation Results')
在这个代码中,首先设置了电气设备外壳的尺寸、局放源位置和传感器耦合位置、局放源和传感器的理论方位角和俯仰角。然后使用MATLAB的meshgrid函数生成电气设备外壳的网格,并使用surf函数绘制电气设备外壳的表面。接着使用scatter3函数绘制局放源和传感器的位置,使用line函数绘制局放源和传感器理论位置的连线,并使用hold on函数保持图形窗口,并且绘制的图形不会覆盖原有的图形。最后,使用xlabel、`ylabel
你把图片改成文本的,方便复制公式,否则很难给你准确的代码
要绘制电气设备外壳和超声阵列传感器的三维仿真结果图,您需要按照以下步骤进行操作:
打开三维仿真软件,如MATLAB、ANSYS等;
在软件中创建一个三维模型,模型的尺寸应与电气设备外壳的尺寸相同;
设置局放源的位置为(60, 60, 60)cm,并将其作为坐标系的原点;
在模型中添加四个点表示超声阵列传感器的耦合位置,其坐标分别为(40, 0, 0)cm、(80, 0, 0)cm、(0, 30, 0)cm和(0, 90, 0)cm;
根据超声阵列传感器的理论值计算其在三维坐标系中的方位角和俯仰角,并设置传感器的朝向;
添加一个相机视角,以便从不同角度观察模型;
调整光源和材质等参数,以获得更好的可视效果;
最后,将模型保存为三维仿真结果图像。
在MATLAB中,您可以使用以下代码来创建一个简单的三维模型并保存为图片:
% 定义电气设备外壳的尺寸
l = 150; % 长
w = 120; % 宽
h = 100; % 高
% 定义局放源的位置
x0 = 60;
y0 = 60;
z0 = 60;
% 定义超声阵列传感器的耦合位置
x1 = 40;
y1 = 0;
z1 = 0;
x2 = 80;
y2 = 0;
z2 = 0;
x3 = 0;
y3 = 30;
z3 = 0;
x4 = 0;
y4 = 90;
z4 = 0;
% 计算超声阵列传感器的方位角和俯仰角
az1 = 76.7; % 方位角
el1 = 46.5; % 俯仰角
az2 = 103.3;
el2 = 46.5;
az3 = 70.5;
el3 = 48.2;
az4 = 109.5;
el4 = 48.2;
% 创建三维模型
figure;
set(gcf,'color','white');
axis equal;
axis([0 l 0 w 0 h]);
hold on;
% 绘制电气设备外壳
plotcube([l w h],[x0 y0 z0],0.8,[0.7 0.7 0.7]);
% 绘制超声阵列传感器
quiver3(x1,y1,z1,0,0,10,'color','r','linewidth',2,'MaxHeadSize',0.5);
quiver3(x2,y2,z2,0,0,10,'color