一辆ROS小车需要哪些东西
我现在想做一个基于ROS的智能移动小车,功能是循迹,避障,基于SLAM构图,定位路径规划
我还需要买什么,需要IMU吗,买的话买哪一个
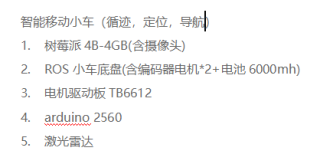
下面是我的购买清单
小魔女参考了bing和GPT部分内容调写:
要实现你想要的智能移动小车,除了上面清单中的设备外,还需要购买IMU(惯性测量单元),用于提供机器人的姿态信息,以及激光雷达,用于提供机器人周围环境的距离信息。
此外,还需要编写代码,实现循迹,避障,基于SLAM构图,定位路径规划等功能。可以使用ROS,Python,C++等语言,编写代码,实现机器人的自主控制。
例如,可以使用ROS的节点,实现机器人的自主控制,包括循迹,避障,基于SLAM构图,定位路径规划等功能。
#include <ros/ros.h>
#include <std_msgs/String.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "robot_control");
ros::NodeHandle nh;
// 循迹
ros::Subscriber sub_track = nh.subscribe("track_info", 1000, track_callback);
// 避障
ros::Subscriber sub_avoid = nh.subscribe("avoid_info", 1000, avoid_callback);
// SLAM构图
ros::Subscriber sub_slam = nh.subscribe("slam_info", 1000, slam_callback);
// 定位路径规划
ros::Subscriber sub_plan = nh.subscribe("plan_info", 1000, plan_callback);
ros::spin();
return 0;
}
void track_callback(const std_msgs::String::ConstPtr& msg)
{
// 循迹代码
}
void avoid_callback(const std_msgs::String::ConstPtr& msg)
{
// 避障代码
}
void slam_callback(const std_msgs::String::ConstPtr& msg)
{
// SLAM构图代码
}
void plan_callback(const std_msgs::String::ConstPtr& msg)
{
// 定位路径规划代码
}
回答不易,记得采纳呀。
不知道你这个问题是否已经解决, 如果还没有解决的话:- 这篇文章:【ROS小车5】_ROS源码移植 编译报错汇总 也许有你想要的答案,你可以看看
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^