神经网络的输出为啥不变呀?(语言-python)
神经网络模型长图片这样 可是为啥不管输入是什么 输出都一模一样 不变
结果一直是(0.5 0.5 0.5 0.5)
(输入数据维度是46 输出是4)
研究了好多天了 减少神经元数量,改变优化器、损失函数种类 ,降低输入维度 都试过啦 还是不行 实在是不知道问题出在哪里啦 有知道的可以帮忙解决一下嘛
你模型的训练代码呢?你不会每次训练之后没有反向传播更新下权重和梯度信息吧。看你打印的输出,基本上都是初始化之后的权重,不然按照你100个epoch存一下模型来看,不可能都是一样的权重
给出文字代码
不能只给神经网络模型这段代码,要给出你使用模型的代码
这是actor神经网络的模型:
class ActorNetwork(object):
"""
Implements actor network
"""
def __init__(self,sess,state_dim,action_dim,lr,tau):
self.sess = sess
K.set_session(sess)
K.set_learning_phase(1)
self.state_dim = state_dim
self.action_dim = action_dim
self.lr = lr
self.tau = tau
self.mainModel, self.mainModel_weights, self.mainModel_state = self._build_model()
self.targetModel, self.targetModel_weights, _ = self._build_model()
self.action_gradient = tf.placeholder(tf.float32, [None, self.action_dim])
self.params_grad = tf.gradients(self.mainModel.output, self.mainModel_weights, -self.action_gradient)
grads = zip(self.params_grad, self.mainModel_weights)
self.optimize = tf.train.AdamOptimizer(self.lr).apply_gradients(grads)
self.sess.run(tf.global_variables_initializer())
def _build_model(self):
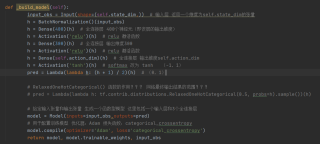
input_obs = Input(shape=(self.state_dim,)) # 输入层 返回一个维度为self.state_dim的张量
h = BatchNormalization()(input_obs)
h = Dense(400, kernel_initializer = 'random_uniform')(h) # 全连接层 400个神经元(即该层的输出维度)
h = LeakyReLU(alpha=0.1)(h)
h = Dense(300, kernel_initializer = 'random_uniform')(h) # 全连接层 输出维度300
h = LeakyReLU(alpha=0.1)(h)
h = Dense(self.action_dim, kernel_initializer = 'random_uniform')(h) # 全连接层 输出维度self.action_dim
h = Activation('tanh')(h) # softmax 改为 tanh
pred = Lambda(lambda h: (h+1)/2)(h)
# RelaxedOneHotCategorical() 函数的作用??? 网络最终输出结果的范围???
# pred = Lambda(lambda h: tf.contrib.distributions.RelaxedOneHotCategorical(0.5, probs=h).sample())(h)
# 给定输入张量和输出张量 生成一个函数型模型 这里包括一个输入层和3个全连接层
model = Model(inputs=input_obs, outputs=pred)
# 用于配置训练模型 优化器:Adam 损失函数:categorical_crossentropy
model.compile(optimizer='Adam'(), loss='categorical_crossentropy')
return model, model.trainable_weights, input_obs
def act(self, state):
act = self.mainModel.predict(state)
return act
这是使用该神经网络获取动作值的部分:
for stp in range(int(args['max_episode_len'])):
a = []
for i in range(env.num_UAVs):
actor = actors[i]
a.append(actor.act(np.reshape(s[i], (-1, actor.state_dim))).reshape(actor.action_dim, )) # 输入状态 输出动作
# reshape 在不改变数据内容的情况下,改变一个数组的格式
# (-1,actor.state_dim) 表示将智能体i的状态信息转化为列数为actor.state_dim的矩阵 行数自适应
# 输入到actor网络的输出结果(动作)再reshape为行数为actor.action_dim的矩阵
for i in range(env.num_UAVs):
# 增加探索扰动, 输出限制在 [0, 1] 范围内
a[i] = np.clip(np.random.normal(a[i], NOISE), 0, 1)
s2, r, done = env.step(a)
replayMemory.add(s, a, r, done, s2)
s = s2
```
不知道你这个问题是否已经解决, 如果还没有解决的话:- 你可以参考下这篇文章:神经网络python实现回归及问题解决(2)
如果你已经解决了该问题, 非常希望你能够分享一下解决方案, 写成博客, 将相关链接放在评论区, 以帮助更多的人 ^-^