大概算是比较简单的坐标系旋转问题
一个计算机视觉的问题,应该挺简单的!假设有三个原点重合,轴不重合的三个坐标系a,b,c,现在希望把a旋转到和c重合,但a坐标系只能分别按b坐标系的轴旋转,请问怎么计算该怎么转
我是这样想的
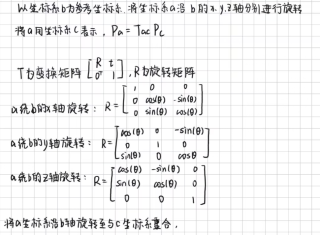
请问为什么不对啊,这个问题应该怎么解啊?
要从坐标系A旋转到坐标系C,需要求出从A到C的旋转矩阵。 可以使用两个坐标系之间的变换公式,以及坐标系B作为中间坐标系的角度来计算。 具体来说,假设从坐标系B到坐标系A的旋转矩阵为RBA,从坐标系B到坐标系C的旋转矩阵为RBC,则从坐标系A到坐标系C的旋转矩阵为RAC = RBC * RBA。
如果不使用计算机,可以通过计算旋转矩阵来将a坐标系旋转到和c重合。具体来说,你可以把b坐标系旋转到c坐标系,然后计算a坐标系到c坐标系的旋转矩阵,拆分为旋转轴和角度,最后将旋转轴和角度作用在a坐标系上,即可将其旋转到与c坐标系重合的位置。
如果希望将坐标系A旋转到和坐标系C重合,需要寻求从坐标系A到坐标系B和从坐标系B到坐标系C的旋转矩阵。您可以使用以下步骤来计算:
计算坐标系A到坐标系B的旋转矩阵R_AB。
计算坐标系B到坐标系C的旋转矩阵R_BC。
计算从坐标系A到坐标系C的总旋转矩阵R_AC=R_BC * R_AB。
在您确定了R_AC之后,可以使用它将坐标系A中的任意点旋转到坐标系C中。
请注意,如果您想确定R_AB和R_BC,则需要关于这两个坐标系之间的轴的额外信息。例如,您可以使用两个坐标系之间的角度和旋转轴来求解。
这类问题一般需要先求出两个坐标系间的旋转矩阵(rotation matrix)。 可以使用两个坐标系的基向量或者利用欧拉角(Euler angles)或四元数(quaternions)等方法求解。 求出两个坐标系间的旋转矩阵后,再根据b坐标系对a坐标系的轴进行旋转,进而得到a坐标系相对于c坐标系的变换矩阵。
该回答引用ChaGPT
请参考下面的解决方案,觉得可行,还请点击 采纳 ,感谢!
要把坐标系A从坐标系B的角度变换到坐标系C的角度,您需要计算从坐标系B到坐标系C的旋转矩阵Rbc。然后,您可以将该矩阵乘以坐标系A的点,以计算该点在坐标系C中的位置。
因为您没有提供三个坐标系的具体参数,因此无法给出具体的旋转矩阵计算方法。通常情况下,您可以使用欧拉角或四元数来计算旋转矩阵。
对于欧拉角,您可以使用三个欧拉角(例如欧拉角(φ,θ,ψ))来描述坐标系B到坐标系C的旋转。您可以使用这三个角度计算旋转矩阵。
四元数也可以用来计算旋转矩阵,四元数通过四个参数(x,y,z,w)描述坐标系B到坐标系C的旋转。您可以使用四元数计算旋转矩阵。
在计算机视觉中,通过旋转坐标系a以使其与c坐标系重合是一个常见问题。
在这种情况下,您需要先确定坐标系b和c的轴方向。然后,您可以使用Rodrigues公式(或任意其他方法)计算出从b到c的旋转矩阵。最后,您可以使用该旋转矩阵旋转坐标系a以获得与c坐标系重合的坐标系。
具体而言,首先您需要计算出b到c的旋转轴向量。然后,您可以使用以下Rodrigues公式计算出旋转矩阵:
R = I + sinθ * [u]x + (1 - cosθ) * [u]x^2
其中:
I是单位矩阵
θ是旋转角度
[u]x是以u为轴向量的旋转矩阵
[u]x^2是[u]x的平方
最后,您可以将该旋转矩阵乘以坐标系a的原点,以获得与c坐标系重合的坐标系。