关于稳像云台姿态控制中相机姿态误差表征
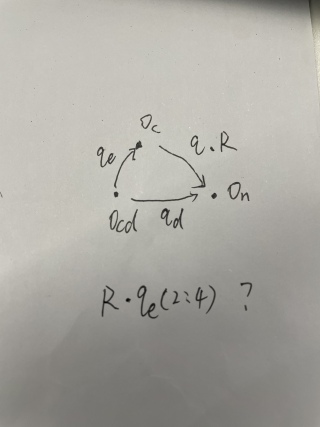
背景:如下图所示,Oc表示云台末端相机坐标系,Ocd表示期望云台姿态的坐标系,On为北东地坐标系。q、qd、qe表示相应姿态转换的四元数,R(3×3矩阵)表示Oc到On的旋转矩阵
问题:看到云台控制代码中有用R乘qe的后三项,即R*qe(2:4),其中qe(2:4)为3×1列向量,得到的是相机误差在北东地坐标系下的表示,是3个角度,单位为rad。旋转矩阵乘四元数的虚数部分有什么物理意义啊?这样做的原理是什么?麻烦各位da佬指点一下好费解啊!
四元数的实部代表旋转轴的方向,虚数部代表旋转轴的长度,即旋转角。对于相机姿态误差表征,将相机姿态误差四元数qe乘以旋转矩阵R的后三项(R*qe(2:4))即可得到相机误差在北东地坐标系下的表示,以3个角度的形式呈现,单位为rad。这样的做法是将四元数形式的姿态误差转化为欧拉角,方便误差的矫正和表示。
四元数表示的是旋转,四元数的实数部分代表旋转轴的方向,虚数部分代表旋转角的大小。
乘以四元数的虚数部分的含义是:对一个向量进行旋转,以四元数所表示的旋转轴和角度为模板,旋转向量。
因此,把R矩阵乘以qe的虚数部分的目的是计算出相机误差在北东地坐标系下的三个角度。它对于理解四元数表示旋转的思想以及四元数如何被用于计算旋转向量是很有帮助的。
R乘qe(2:4)运算表示的是把相机误差(四元数qe表示的旋转)从云台坐标系表示转换到北东地坐标系表示。乘以R矩阵相当于是在转换坐标系,得到的结果是相机误差在北东地坐标系下的表示,即3个角度(以弧度制表示)。
四元数与旋转矩阵的乘积的含义是对四元数表示的旋转先在当前坐标系下表示,再通过旋转矩阵将其转换到另一个坐标系。
对于R * qe(2:4)运算,四元数qe是对云台姿态误差的表示,而R是Oc到On坐标系的旋转矩阵,因此R * qe(2:4)表示的是将云台姿态误差从云台坐标系表示转换到北东地坐标系表示。以角度形式表示的姿态误差更便于人们理解,因此有时可以在控制算法中使用角度而不是四元数或旋转矩阵。
这样的误差表示对于控制系统非常重要,因为它可以帮助我们了解相机姿态与期望姿态之间的差距。通过评估误差,您可以确定是否需要对相机姿态进行修正,以获得更准确的图像。通常,误差传递给控制算法,以通过调整马达速度和位置来调整相机姿态,从而达到期望的姿态。
对于R * qe(2:4)的结果,用列向量表示相机误差意味着它是一个三维矢量,这种表示方式比矩阵形式更加简洁,更容易计算和使用。例如,您可以通过仅考虑这个向量的长度来评估误差的大小,或者通过对其进行标准化来表示其方向。使用角度的优点在于它比较容易理解和使用,并且有助于向用户展示系统的状态和性能。
该回答引用ChatGPT
如果觉得 有用请点击 采纳,感谢!
用旋转矩阵乘以四元数的虚数部分,得到的是相机误差在北东地坐标系下的表示,是3个角度。四元数是用来表示3维空间内一个点相对于另一个坐标系的旋转关系,其实四元数就是三维旋转矩阵的升级版,比起旋转矩阵更方便灵活。四元数乘法可以将两个四元数表示的旋转叠加,这样就可以避免矩阵运算过程中的数值误差。四元数的实数部分代表四元数旋转过程中的旋转角度,而虚数部分代表旋转轴。所以,在这种情况下,用旋转矩阵乘以四元数的虚数部分,得到的就是相机误差在北东地坐标系下的表示。