为什么改变zhuanjiao的值就能改变舵机的角度
zhuanjiao是在main文件中定义的,我没有在其他文件中找到zhuanjiao和舵机角度pwm的关系
zhuanjiao值和pwm占空比设置肯定是对应的,换一个ide全局搜索下就知道了,找不到只能说代码不全
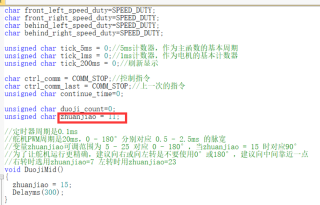
在这段代码中,zhuanjiao可调范围为5-25,其对应的舵机角度范围是0-180°。当zhuanjiao=15时,舵机角度为90°。
在函数DuojiMid()中,zhuanjiao被赋值为15,这会让舵机转到90°的位置,然后延迟300ms,可能是为了等待舵机转到正确的位置。
舵机的PWM周期是20ms,0-180°分别对应0.5-2.5ms的脉宽。程序中定义了舵机PWM周期和zhuanjiao值之间的关系,如zhuanjiao变量值对应的舵机角度,这样改变zhuanjiao的值就能改变舵机的角度。