用hc-05蓝牙进行两msp430的串口通信失败
我们的目的是用mpu6050控制led灯的亮灭。我们用msp430f5529作为主机处理mpu6050数据,用msp430f6638作为从机接受主机数据及控制led灯电路。用蓝牙模块进行两单片机间的数据传输,ccs用的8.1版本。
实验进行中,我们先是用串口连接两单片机,然后运行ccs程序,可以观察到正确的现象,说明程序和串口没有问题。然后主机用hc05蓝牙发送数据,用电脑端口接蓝牙接受数据,可以在串口助手上看到正确的数据,说明蓝牙模块也没有问题。
然后我们用蓝牙来进行两单片机的连接,就没有了任何现象,我们实在是不知道出了什么问题。
主机:
从机:
用串口连接两单片机:
用电脑接受主机数据:
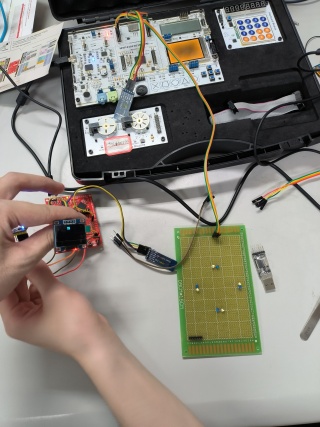
用蓝牙连接两单片机:
主机主函数及串口程序:
#include "driverlib.h"
#include "mpu6050/Mpu-6050.h"
#include "UART.h"
#include "clk.h"
#include "OLED.h"
int main(void)
{
int a;
int b;
int c;
unsigned char f[3]="°";
unsigned char x[15]="X轴角度--- ";
unsigned char y[15]="Y轴角度--- ";
unsigned char z[15]="Z轴角度--- ";
unsigned char h[30]="--------------------";
WDT_A_hold(WDT_A_BASE);
InitMPU6050();
UARTInit();
clk_Init ();
OLED_Init();//oled初始化
P1DIR |=BIT0;
P1OUT |=BIT0;
while(1)
{
a=Mpu6050AccelAngle(ACCEL_XOUT);
//b=Mpu6050AccelAngle(ACCEL_YOUT);
//c=Mpu6050AccelAngle(ACCEL_ZOUT);
if(a<0){
a=-a;
}
OLED_Clear();
OLED_ShowNum(6,0,a,7,16);
//OLED_ShowNum(6,2,(int)b,7,16);
//OLED_ShowNum(6,4,(int)c,7,16);
__delay_cycles(8000000);
//FS(h);
//FSNO(x);
HS(a);
//FS(f);
//FSNO(y);
//HS(b);
//FS(f);
//FSNO(z);
//HS(c);
//FS(f);
}
}
#include "driverlib.h"
#include"UART.h"
void UARTInit()
{
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P3,
GPIO_PIN3+GPIO_PIN4
);
USCI_A_UART_initParam param1 = {0};
param1.selectClockSource = USCI_A_UART_CLOCKSOURCE_SMCLK;
param1.clockPrescalar = 52;
param1.firstModReg = 1;
param1.secondModReg = 0;
param1.parity = USCI_A_UART_NO_PARITY;
param1.msborLsbFirst = USCI_A_UART_LSB_FIRST;
param1.numberofStopBits = USCI_A_UART_ONE_STOP_BIT;
param1.uartMode = USCI_A_UART_MODE;
param1.overSampling = USCI_A_UART_OVERSAMPLING_BAUDRATE_GENERATION;
if (STATUS_FAIL == USCI_A_UART_init(USCI_A0_BASE, ¶m1)){
return;
}
USCI_A_UART_enable(USCI_A0_BASE);
}
void FS(unsigned char*write) //向串口写一个字符串
{
while(*write!='\0')
{
USCI_A_UART_transmitData (USCI_A0_BASE,*write);
__delay_cycles(5);
write++;
}
USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
void FSNO(unsigned char*write) //向串口写一个字符串
{
while(*write!='\0')
{
USCI_A_UART_transmitData (USCI_A0_BASE,*write);
__delay_cycles(5);
write++;
}
}
void YS(int b)
{
unsigned char a0[2]="0";
unsigned char a1[2]="1";
unsigned char a2[2]="2";
unsigned char a3[2]="3";
unsigned char a4[2]="4";
unsigned char a5[2]="5";
unsigned char a6[2]="6";
unsigned char a7[2]="7";
unsigned char a8[2]="8";
unsigned char a9[2]="9";
if(b==0)
{
FSNO(a0);
}
else if(b==1)
{
FSNO(a1);
}
else if(b==2)
{
FSNO(a2);
}
else if(b==3)
{
FSNO(a3);
}
else if(b==4)
{
FSNO(a4);
}
else if(b==5)
{
FSNO(a5);
}
else if(b==6)
{
FSNO(a6);
}
else if(b==7)
{
FSNO(a7);
}
else if(b==8)
{
FSNO(a8);
}
else if(b==9)
{
FSNO(a9);
}
}
void HS(int a)
{
int b;
int c;
int e;
int f;
unsigned char sign[2]="-";
if(a>=0)
{
b= a%10; //个位数
c= a/ 10 % 10; //十位数
e= a/ 100 % 10; //百位数
f= a/ 1000; //千位数
if(f==0&&e==0&&c==0&&b!=0)
{
//USCI_A_UART_transmitData (USCI_A0_BASE,0x45);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x35);
YS(0);
//YS(b);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
else if(f==0&&e==0&&c!=0)
{
YS(c);
//YS(b);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
else if(f==0&&e!=0)
{
YS(e);
YS(c);
YS(b);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
else if(f!=0)
{
YS(f);
YS(e);
YS(c);
YS(b);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
}
else if(a<0)
{
a=-a;
b= a%10; //个位数
c= a/ 10 % 10; //十位数
e= a/ 100 % 10; //百位数
f= a/ 1000; //千位数
if(a<10)
{
//FSNO(sign);
YS(0);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
else if(f==0&&e==0&&c==0&&b!=0)
{
//FSNO(sign);
YS(c);
//YS(b);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
//USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
else if(f==0&&e==0&&c!=0)
{
FSNO(sign);
YS(e);
YS(c);
YS(b);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
else if(f!=0)
{
FSNO(sign);
YS(f);
YS(e);
YS(c);
YS(b);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0d);
USCI_A_UART_transmitData (USCI_A0_BASE,0x0a);
}
从机主函数及串口程序:
#include <msp430.h>
#include <msp430f6638.h>
#include "driverlib.h"
#include "clk.h"
unsigned char receivedData = 0;
/**
* main.c
*/
void UART_RS232_Init(void) //RS232接口初始化函数
{
/*通过对P3.4。P3.5,P4.4,P4.5的配置实现通道选择
使USCI切换到UART模式*/
P3DIR|=(1<<4)|(1<<5);
P4DIR|=(1<<4)|(1<<5);
P4OUT|=(1<<4);
P4OUT&=~(1<<5);
P3OUT|=(1<<5);
P3OUT&=~(1<<4);
P8SEL|=0x0c; //模块功能接口设置,即P8.2与P8.3作为USCI的接收口与发射口
UCA1CTL1|=UCSWRST; //复位USCI
UCA1CTL1|=UCSSEL_1; //设置辅助时钟,用于发生特定波特率
UCA1BR0=0x03; //设置波特率
UCA1BR1=0x00;
UCA1MCTL=UCBRS_3+UCBRF_0;
UCA1CTL1&=~UCSWRST; //结束复位
UCA1IE|=UCRXIE; //使能接收中断
}
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
P4DIR |=BIT5+BIT6+BIT7; //控制LED5、LED4、LED3的IO口P4.5、P4.6、P4.7设置为输出
P5DIR |=BIT7;//控制LED2的IO口P5.7设置为输出
P8DIR |=BIT0;//控制LED1的IO口P8.0设置为输出
P2DIR |=BIT1+BIT2;
clk_Init ();
UART_RS232_Init();
//OLED_Init();//oled初始化
//OLED_Clear();
//OLED_ShowChar(6,0,'b',16);
//UART_Init(USCI_A1_BASE, 9600);
__bis_SR_register(GIE);
while(1)
{
}
}
#pragma vector=USCI_A1_VECTOR //USCI中断服务函数,无论是单片机串口发送还是接
//收都会进入这个中断服务程序,但是串口初始化时,只是开启了串口接收中断,只有单片
//机串口接收到数据才会进入这个中断
__interrupt void USCI_A1_ISR(void)
{
switch(__even_in_range(UCA1IV,4))
{
case 0:break; //无中断
case 2: //接收中断处理
//while(!(UCA1IFG&UCRXIFG)); //等待完成接收,加上词句运行结
//果不稳定,有时PC机和单片机通讯不起,最早用UCTXIFG没有问题,但是这个寄存器是发送
//寄存器UCRXIFG
receivedData = UCA1RXBUF;
if(receivedData>0x33){
P2OUT |=BIT1;
P2OUT &=~BIT2;
}
if(receivedData<0x33){
P2OUT &=~BIT1;
P2OUT |=BIT2;
}
break;
case 4:break; //发送中断不处理
default:break; //其他情况无操作
}
}
/*#pragma vector=USCI_A1_VECTOR
__interrupt void USCI_A1_ISR (void)
{
//uint8_t receivedData = 0;
unsigned char receivedData = 0;
switch (__even_in_range(UCA1IV,4))
{
//Vector 2 - RXIFG
case 2:
receivedData = USCI_A_UART_receiveData(USCI_A1_BASE);
if(receivedData>0x33){
P2OUT |=BIT1;
P2OUT &=~BIT2;
}
if(receivedData<0x33){
P2OUT &=~BIT1;
P2OUT |=BIT2;
}
//USCI_A_UART_transmitData(USCI_A1_BASE,receivedData);
break;
default:
break;
}
}
*/
#include "driverlib.h"
bool UART_Init(uint16_t baseAddress, uint32_t Baudrate)
{
float UART_Temp = 0;
USCI_A_UART_initParam huart = {0};
if(baseAddress == USCI_A0_BASE) //P3.3, P3.4 = USCI_A0 TXD/RXD
{
GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P3, GPIO_PIN3);
GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P3, GPIO_PIN4);
}
else if(baseAddress == USCI_A1_BASE) //P4.4, P4.5 = USCI_A1 TXD/RXD
{
GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P8, GPIO_PIN2);
GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P8, GPIO_PIN3);
}
if(Baudrate <= 9600)
{
huart.selectClockSource = USCI_A_UART_CLOCKSOURCE_ACLK;
UART_Temp = (float)UCS_getACLK()/Baudrate;
}
else
{
huart.selectClockSource = USCI_A_UART_CLOCKSOURCE_SMCLK;
UART_Temp = (float)UCS_getSMCLK()/Baudrate;
}
if(UART_Temp < 16)
huart.overSampling = USCI_A_UART_LOW_FREQUENCY_BAUDRATE_GENERATION;
else
{
huart.overSampling = USCI_A_UART_OVERSAMPLING_BAUDRATE_GENERATION;
UART_Temp /= 16;
}
huart.clockPrescalar = (int)UART_Temp;
if(huart.overSampling == USCI_A_UART_LOW_FREQUENCY_BAUDRATE_GENERATION)
{
huart.secondModReg = (int)((UART_Temp - huart.clockPrescalar) * 8);
}
else
{
huart.firstModReg = (int)((UART_Temp - huart.clockPrescalar) * 16);
}
huart.parity = USCI_A_UART_NO_PARITY;
huart.msborLsbFirst = USCI_A_UART_LSB_FIRST;
huart.numberofStopBits = USCI_A_UART_ONE_STOP_BIT;
huart.uartMode = USCI_A_UART_MODE;
if (STATUS_FAIL == USCI_A_UART_init(baseAddress, &huart))
{
return STATUS_FAIL;
}
//Enable UART module for operation
USCI_A_UART_enable(baseAddress);
//Enable Receive Interrupt
USCI_A_UART_clearInterrupt(baseAddress, USCI_A_UART_RECEIVE_INTERRUPT);
USCI_A_UART_enableInterrupt(baseAddress, USCI_A_UART_RECEIVE_INTERRUPT);
return STATUS_SUCCESS;
}
你应该再加一步测试,用电脑做主机,通过蓝牙去与从机通讯,看看是否能控制,这样能把问题范围进一步缩小,按照你目前的描述,问题可能出在从机的蓝牙转串口这一段
不要在中断里处理耗时任务,比如接收蓝牙数据