arcuo进行位姿估计,如何得出标记到镜头的距离?
请问在用aruco进行位姿估计后所得出的R(旋转矩阵)和T(平移矩阵)的具体含义是什么?
相机镜头到标记的距离是r和t的第三个参数吗?
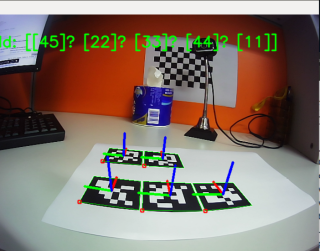
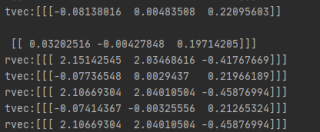
运行结果及报错内容
我的解答思路和尝试过的方法
我想要达到的结果
你可以先看看得到这两个矩阵之后的用法
cv::aruco::estimatePoseSingleMarkers(v_marker_corner, marker_size, cameraMatrix, distCoeffs, rvecs, tvecs);
函数作用:估计marker在相机坐标系中的3D位姿。
参数:
第一个参数:
第二个参数:marker的尺寸
第三个参数:相机的内参矩阵
第四个参数:相机的畸变系数
第五个参数:输出marker坐标系到相机坐标系的旋转变换矩阵R
第六个参数:输出marker坐标系到相机坐标系的旋转变换矩阵T
注: marker坐标系用marker的位置有关, z轴向外。
https://blog.csdn.net/qq_45445740/article/details/122296313
同问
您好,我是有问必答小助手,您的问题已经有小伙伴帮您解答,感谢您对有问必答的支持与关注!PS:问答VIP年卡 【限时加赠:IT技术图书免费领】,了解详情>>> https://vip.csdn.net/askvip?utm_source=1146287632