指令转矩信号与实际转矩信号不一致
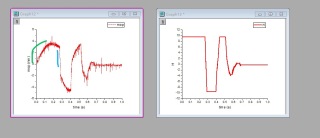
有没有兄弟比较懂AC伺服电机驱动器的哇,右边是上位机给的指令转矩,左边是实际电机转矩,为啥转矩上升的这么慢,下降的却这么快呢,求解答啊,过了三天了没有思路,谢谢各位兄弟了!
我的理解是这样的,你给了扭力F,根据负载的属性,理论上F=ma,负责重,加速度就小,负载轻,加速度就大,加速度会影响到伺服的实际转速V,V=a*t而很多情况下转速是有专门的参数和指令限制的,同时由于有加减速时间的影响,所以,实际转速和加减速时间限制了加速度a快速上升的值,那么负载实际受力F1就没有办法快速接近F,只能缓慢提升,由于力臂固定,所有,力矩的曲线就慢慢上升,而下降的情况就不同了,力F是直接撤销的,a直接变成0,那么V也直接就是0,只靠惯性运行,那么实际受力F1也是直接变为0,所以,下降就快了,等受到反向的力时同样的原理,反向力矩也会缓慢变换。
你的电流环的增益不合适。增益过小就容易这样。
可以看一下我的文章,里面详述了整定各个伺服控制环的过程
排除供电问题后,可直接找售后。
是参数不一致导致的