当状态空间模型存在D矩阵时,卡尔曼滤波公式问题
最近学习了卡尔曼滤波五大公式的推导,是基于如下状态空间模型进行的
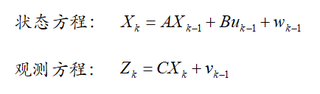
得出的五大公式如下

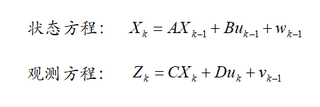
但有时候状态空间模型中会存在D矩阵,就变成了下图所示:
五大公式中的后验估计公式(如下图所示)是否需要做出相应的修改?
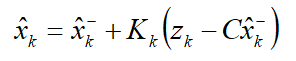
原因是,后验估计公式中的这部分:
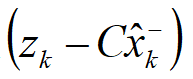
当不存在D矩阵时,括号内的部分反映了 测量得到的Zk_measure和由估计值通过观测方程得到的Zk_estimate=CXk之间的差异
但如果存在D矩阵,Zk_estimate不再等于CXk,而是Zk_estimate=CXk+Duk,那么卡尔曼滤波五大公式中的后验估计公式是否需要修改成下图所示:

其他公式是否也需要修改?
我看到有些论文中即使存在D矩阵,也还是套用原来的卡尔曼滤波公式,因此提出以上疑问。