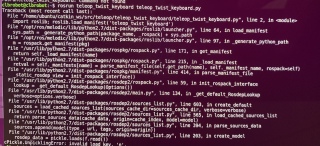
ros机器人 运行$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py报错
通过ssh 连接到机器人后输入$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
报错:cpickle.unpicklingerror:invalid load key.‘n'
通过ssh 连接到机器人后输入$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
报错:cpickle.unpicklingerror:invalid load key.‘n'