模拟实现一个T型速度曲线的运动
实现单轴的T型速度曲线相对运动指令点位运动
开发工具:vs2019
核心算法写在DLL动态链接库中
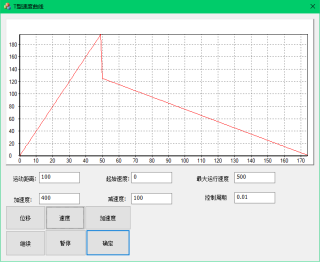
这是速度曲线,为啥会这样
核心代码有点多,不好粘贴,有请各位大佬来讨论
您好,我是有问必答小助手,你的问题已经有小伙伴为您解答了问题,您看下是否解决了您的问题,可以追评进行沟通哦~
如果有您比较满意的答案 / 帮您提供解决思路的答案,可以点击【采纳】按钮,给回答的小伙伴一些鼓励哦~~
ps:问答VIP仅需29元,即可享受5次/月 有问必答服务,了解详情>>> https://vip.csdn.net/askvip?utm_source=1146287632
MFC部分代码
void CTmymfcDlg::OnBnClickedButton1() //位移曲线
{
//提取编辑框中输入的参数
flag = 1;
GetDlgItem(IDC_EDIT7)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit7 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT8)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit8 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT9)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit9 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT10)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit10 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT11)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit11 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT12)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit12 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
// TODO: 在此添加控件通知处理程序代码
T_Position(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, y1Values,nEdit12);
nSize = T_length(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11,nEdit12);
SetTimer(1, 1, NULL);
//delete[]y1Values;
k = 1;
}
void CTmymfcDlg::OnBnClickedOk() //确定曲线
{
// TODO: 在此添加控件通知处理程序代码
delete[]y1Values;
CDialogEx::OnOK();
}
void CTmymfcDlg::OnTimer(UINT_PTR nIDEvent) //定时器
{
// TODO: 在此添加消息处理程序代码和/或调用默认值
switch (nIDEvent)
{
case 1:
if (k == nSize+1)
{
KillTimer(1);
break;
}
for (i = 0; i <= k; i++)
{
x1Values[i] = i;
}
m_ChartCtrl1.SetZoomEnabled(true);
m_ChartCtrl1.RemoveAllSeries();//清空
pLineserie1 = m_ChartCtrl1.CreateLineSerie();
pLineserie1->SetSeriesOrdering(poNoOrdering);//无序
pLineserie1->SetPoints(x1Values, y1Values, k);
k++;
case 2:
if (k == nSize+1)
{
KillTimer(2);
break;
}
for (i = 0; i <= k; i++)
{
x1Values[i] = i;
}
m_ChartCtrl1.SetZoomEnabled(true);
m_ChartCtrl1.RemoveAllSeries();//清空
pLineserie1 = m_ChartCtrl1.CreateLineSerie();
pLineserie1->SetSeriesOrdering(poNoOrdering);//无序
pLineserie1->SetPoints(x1Values, y1Values, k);
k++;
case 3:
if (k == nSize+1)
{
KillTimer(3);
break;
}
for (i = 0; i <= k; i++)
{
x1Values[i] = i;
}
m_ChartCtrl1.SetZoomEnabled(true);
m_ChartCtrl1.RemoveAllSeries();//清空
pLineserie1 = m_ChartCtrl1.CreateLineSerie();
pLineserie1->SetSeriesOrdering(poNoOrdering);//无序
pLineserie1->SetPoints(x1Values, y1Values, k);
k++;
case 4:
if (k == nSize + 1)
{
KillTimer(4);
break;
}
m_ChartCtrl1.SetZoomEnabled(true);
//m_ChartCtrl1.RemoveAllSeries();//清空
pLineserie1 = m_ChartCtrl1.CreateLineSerie();
pLineserie1->SetSeriesOrdering(poNoOrdering);//无序
pLineserie1->SetPoints(x1Values, y1Values,k);
k++;
default:
break;
}
}
void CTmymfcDlg::OnBnClickedButton2()
{
//提取编辑框中输入的参数
flag = 2;
GetDlgItem(IDC_EDIT7)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit7 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT8)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit8 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT9)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit9 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT10)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit10 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT11)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit11 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT12)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit12 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
T_Velocity(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, y1Values,nEdit12);
nSize = T_length(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11,nEdit12);
// TODO: 在此添加控件通知处理程序代码
SetTimer(2, 1, NULL);
k = 1;
}
void CTmymfcDlg::OnBnClickedButton3()
{
//提取编辑框中输入的参数
flag = 3;
GetDlgItem(IDC_EDIT7)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit7 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT8)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit8 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT9)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit9 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT10)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit10 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT11)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit11 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
GetDlgItem(IDC_EDIT12)->GetWindowTextW(szEdit);
for (i = 0; i < szEdit.GetLength(); i++)
{
cEdit[i] = szEdit[i];
}
nEdit12 = atof(cEdit);
szEdit.Empty();
memset(cEdit, '\0', sizeof(cEdit));
// TODO: 在此添加控件通知处理程序代码
T_Acceleration(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, y1Values,nEdit12);
nSize = T_length(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11,nEdit12);
SetTimer(3, 1, NULL);
k = 1;
}
void CTmymfcDlg::OnBnClickedButton4()
{
// TODO: 在此添加控件通知处理程序代码
if (flag == 1)
{
KillTimer(1);
}
else if (flag == 2)
{
KillTimer(2);
}
else if (flag == 3)
{
KillTimer(3);
}
if (flag2 == 1)
{
KillTimer(4);
}
//m_ChartCtrl1.SetZoomEnabled(true);
//m_ChartCtrl1.RemoveAllSeries();//清空
//pLineserie1 = m_ChartCtrl1.CreateLineSerie();
//pLineserie1->SetSeriesOrdering(poNoOrdering);//无序
//pLineserie1->SetPoints(x1Values, y1Values, k - 1);
}
void CTmymfcDlg::OnBnClickedButton5()
{
// TODO: 在此添加控件通知处理程序代码
if (flag == 1)
{
T_Positionx(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, y1Values,k-2);
nSize = T_lengthx(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, k-2);
}
else if (flag == 2)
{
T_Velocityx(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, y1Values,k-2);
nSize = T_lengthx(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, k-2);
}
else if (flag == 3)
{
T_Accelerationx(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, y1Values,k-2);
nSize = T_lengthx(nEdit7, nEdit8, nEdit9, nEdit10, nEdit11, k-2);
}
flag2 = 1;
a = k - 2;
for (i = 0; i <= nSize; i++)
{
x1Values[i] = a + i;
}
k = 1;
SetTimer(4, 1, NULL);
//flag2 = 0;
k = 1;
}DLL一个接口函数(位移)
double * T_Position(double nDistance, double nStartVelocity, double nMaxVelocity, double nAcceleration, double nDeceleration, double* p,double x)
{
double nStartPosition = 0;//起始位置
double nTime = 0;//起始时间
double nStopVelocity = 0;//停止速度
double nFeasibleVelocity = 0;//可达到的最大速度
double nVelocity = 0; //匀速速度
double nAcTime = 0;//加速时间
double nAvgTime = 0;//匀速时间
double nDeTime = 0;//减速时间
double nAcVelocity = 0;//加速位移
double nAvgVelocity = 0;//匀速位移
double nDeVelocity = 0;//减速位移
double nTimer = x;//计时
double i = 0;//循环变量
int k = 0;
//公式求可达到的最大速度
nDistance += nStartPosition;
nFeasibleVelocity = sqrt((2.0 * nAcceleration * nDistance + nStartVelocity * nStartVelocity+ nStopVelocity * nStopVelocity) / 2);
//确定匀速阶段速度
if (nMaxVelocity < nFeasibleVelocity)
{
nVelocity = nMaxVelocity;
}
else
{
nVelocity = nFeasibleVelocity;
}
//计算加速阶段时间和位移
nAcTime = (nVelocity - nStartVelocity) / nAcceleration;
nAcVelocity = nStartVelocity * nAcTime + (1.0 / 2.0) * nAcceleration * nAcTime * nAcTime;
//计算匀速阶段的时间和位移
nAvgTime = (nDistance - (nVelocity * nVelocity - nStartVelocity * nStartVelocity) / (2.0 * nAcceleration)- (nStopVelocity * nStopVelocity - nVelocity * nVelocity) / (2.0 * -nDeceleration)) / nVelocity;
nAvgVelocity = nVelocity * nAvgTime;
//计算减速阶段的时间和位移
nDeTime = (nVelocity - nStopVelocity) / nDeceleration;
nDeVelocity = nVelocity * nDeTime - (nDeceleration * nDeTime * nDeTime) / 2;
//计算轨迹的离散点位
nTime = nAcTime + nAvgTime + nDeTime;
for (i = 0, k = 0; i <= nTime; i += nTimer, k++)
{
if (i >= 0 && i < nAcTime)
{
p[k] = nStartPosition + nStartVelocity + (nAcceleration * i * i) / 2;
}
else if (i >= nAcTime && i < nAcTime + nAvgTime)
{
p[k] = nStartPosition + nAcVelocity + nVelocity * (i - nAcTime);
}
else if (i >= nAvgTime + nAcTime && i <= nTime)
{
p[k] = nStartPosition + nAcVelocity + nAvgVelocity + nVelocity * (i - nAcTime - nAvgTime)- nDeceleration * (i - nAcTime - nAvgTime) * (i - nAcTime - nAvgTime) / 2;
}
else
{
p[k] = 0;
}
}
return p;
}