SLAM ORB-SLAM2:Map Viewer画面不出现任何内容,卡死
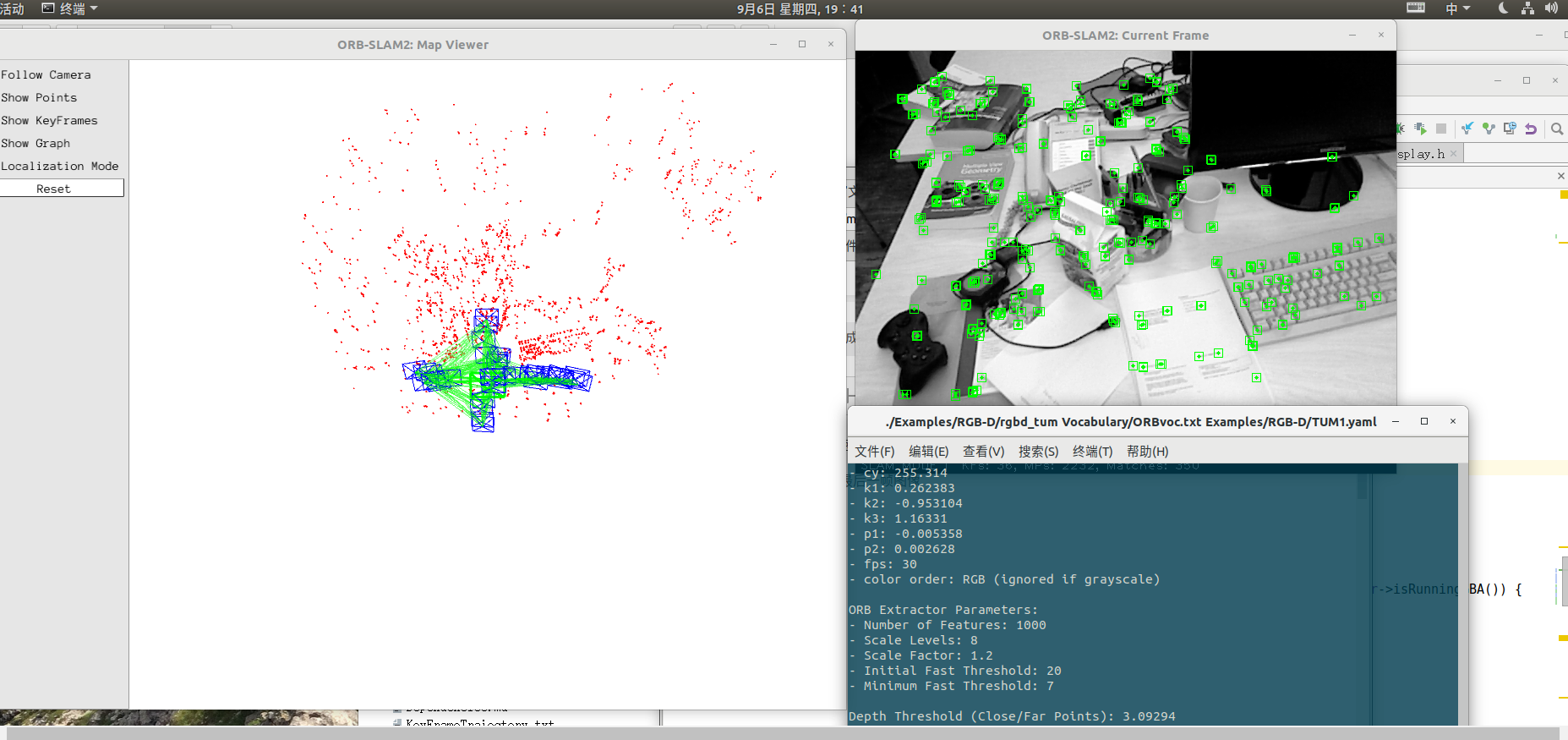
如图所示,这是别人的图片左侧有轨迹画面,我的只有右边的两个窗口,ORB-SLAM2:Map Viewer窗口没有任何画面,并且是卡死的,请问怎么回事?
我也碰到了同样的情况,在Pangolin/src/display/device/display_x11.cpp文件中,注释掉123和124这两行,将122行修改为GLX_DOUBLEBUFFER , glx_doublebuffer ? True : False,重新编译Pangolin就显示Map viewer了
在出现其他slam运行时,pangolin卡死问题,也可以尝试解决
我是运行rgb相机的语义slam时出现pangolin卡死,使用这个方法解决了
很是奇怪,在今天不忙的时候,重新编译了Pangolin 好几遍后突然界面就不卡了,但具体原因没找到,就是多编译了几遍Pangolin