ICP算法中求中心化点集之后,计算正定矩阵的方法,师兄给了一段代码,但是看不懂,求大神解答一下
ICP算法里中
计算两个点集的重心位置坐标,并进行点集中心化生成新的点集;
3) 由新的点集计算正定矩阵N,并计算N的最大特征值及其最大特征向量;
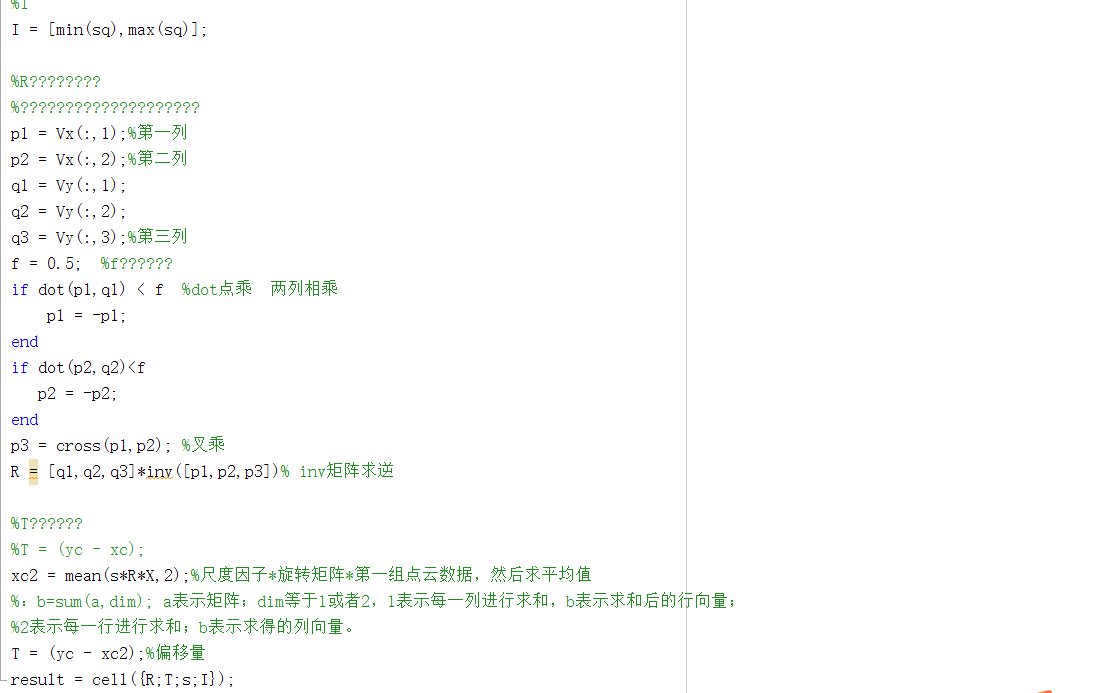
4) 由于最大特征向量等价于残差平方和最小时的旋转四元数,将四元数转换为旋转矩阵R;
5) 在旋转矩阵R被确定后,由平移向量t仅仅是两个点集的重心差异,可以通过两个坐标系中的重心点和旋转矩阵确定;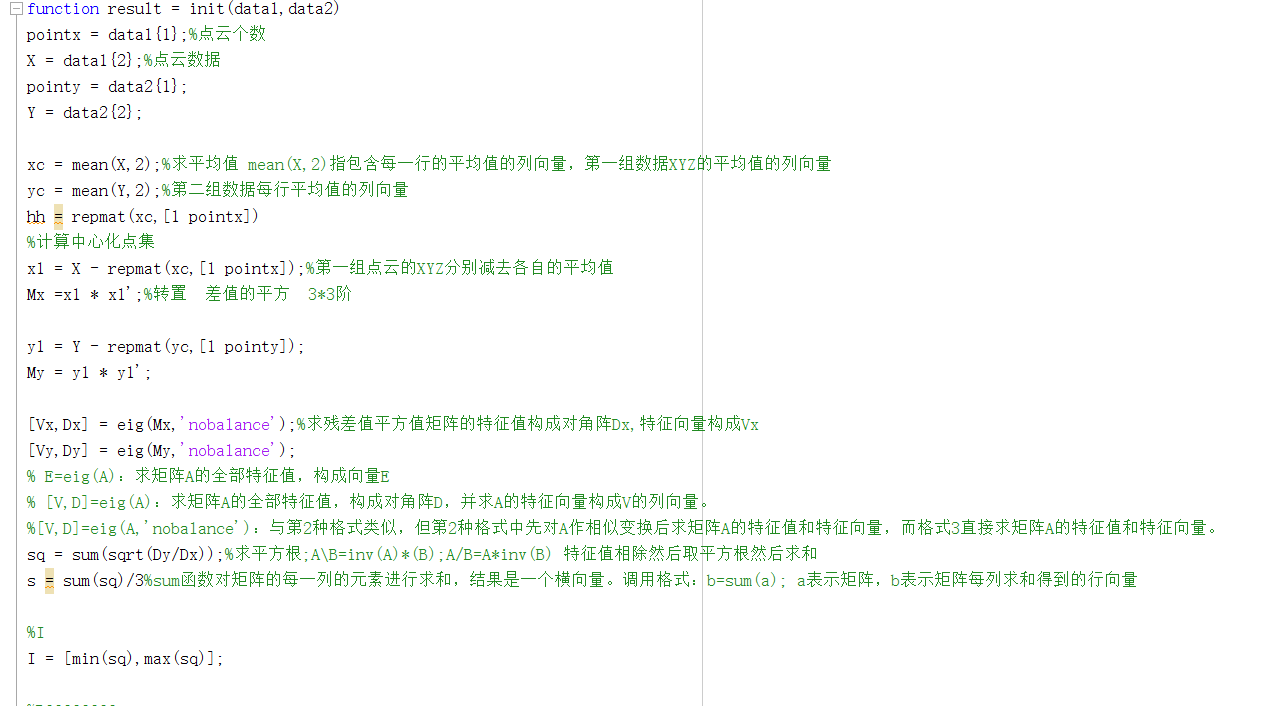
ICP算法里中
计算两个点集的重心位置坐标,并进行点集中心化生成新的点集;
3) 由新的点集计算正定矩阵N,并计算N的最大特征值及其最大特征向量;
4) 由于最大特征向量等价于残差平方和最小时的旋转四元数,将四元数转换为旋转矩阵R;
5) 在旋转矩阵R被确定后,由平移向量t仅仅是两个点集的重心差异,可以通过两个坐标系中的重心点和旋转矩阵确定;