求大佬帮助,opencv灰度图片处理程序可以处理小图片,大图片就出现0xC0000005访问冲突
#include
#include
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
// 大津法函数实现
int OTSU(cv::Mat srcImage)
{
int nCols = srcImage.cols;
int nRows = srcImage.rows;
int threshold = 0;
// 初始化统计参数
int nSumPix[256];
float nProDis[256];
for (int i = 0; i < 256; i++)
{
nSumPix[i] = 0;
nProDis[i] = 0;
}
// 统计灰度级中每个像素在整幅图像中的个数
for (int i = 0; i < nCols; i++)
{
for (int j = 0; j < nRows; j++)
{
int x = srcImage.at(i, j); ** // 此处出错**
nSumPix[x]++;
}
}
// 计算每个灰度级占图像中的概率分布
for (int i = 0; i < 256; i++)
{
nProDis[i] = (float)nSumPix[i] / (nCols * nRows);
}
// 遍历灰度级[0,255],计算出最大类间方差下的阈值
float w0, w1, u0_temp, u1_temp, u0, u1, delta_temp;
double delta_max = 0.0;
for (int i = 0; i < 256; i++)
{
// 初始化相关参数
w0 = w1 = u0_temp = u1_temp = u0 = u1 = delta_temp = 0;
for (int j = 0; j < 256; j++)
{
//背景部分
if (j <= i)
{
// 当前i为分割阈值,第一类总的概率
w0 += nProDis[j];
u0_temp += j * nProDis[j];
}
//前景部分
else
{
// 当前i为分割阈值,第一类总的概率
w1 += nProDis[j];
u1_temp += j * nProDis[j];
}
}
// 分别计算各类的平均灰度
u0 = u0_temp / w0;
u1 = u1_temp / w1;
delta_temp = (float)(w0 w1 pow((u0 - u1), 2));
// 依次找到最大类间方差下的阈值
if (delta_temp > delta_max)
{
delta_max = delta_temp;
threshold = i;
}
}
return threshold;
}
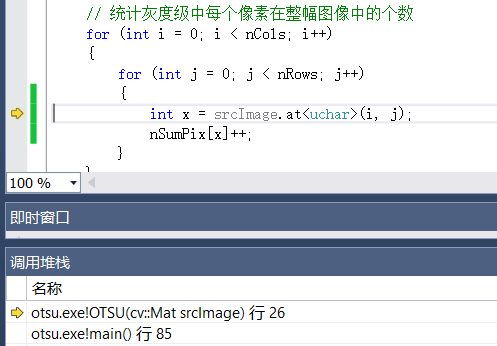
此处调用堆栈
你的srcImage对象是否正确,然后就是i,j的坐标,是否在它的范围之内
0xC0000005 错误是指针未初始化
是的,opencv对于大图片会报错,你可以用x64读取
小图没挂,大图挂了,说明保存图像用的是栈内存而不是堆内存,然后栈不够用暴栈了,保存图像要使用new出来的内存。