张正友相机标定法在求解完内外参后如何求解相机畸变系数?
 请教各位大神,本人初学相机校正,哪位大神能帮我解答一下么,万分感谢!!张正友相机标定法在求解完内外参后如何求解相机畸变系数,即图中的k1和k2是如何求解出来的,另外在内参计算中求解出来的是单位焦距上的像素个数(f/dx)而并不是焦距(f),如何才能计算出无畸变时的连续图像坐标(x,y)。
请教各位大神,本人初学相机校正,哪位大神能帮我解答一下么,万分感谢!!张正友相机标定法在求解完内外参后如何求解相机畸变系数,即图中的k1和k2是如何求解出来的,另外在内参计算中求解出来的是单位焦距上的像素个数(f/dx)而并不是焦距(f),如何才能计算出无畸变时的连续图像坐标(x,y)。
这一页说明的好像是先算出来内参数外参数,然后再算畸变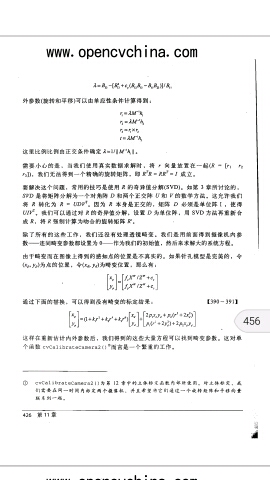
请问是所有摄像头模组都需要进行标定吗?比如豪威系列的相机模组也需要在程序里进行标定吗?
请教各位大神,本人初学相机校正,哪位大神能帮我解答一下么,万分感谢!!张正友相机标定法在求解完内外参后如何求解相机畸变系数,即图中的k1和k2是如何求解出来的,另外在内参计算中求解出来的是单位焦距上的像素个数(f/dx)而并不是焦距(f),如何才能计算出无畸变时的连续图像坐标(x,y)。
这一页说明的好像是先算出来内参数外参数,然后再算畸变
请问是所有摄像头模组都需要进行标定吗?比如豪威系列的相机模组也需要在程序里进行标定吗?