opencv双目测距 得到三维坐标结果溢出
做Opencv双目测距
使用cvReprojectImageTo3D函数求目标三维坐标
CvMat* depth_disparity=cvCreateMat(img_left_Change->height,img_left_Change->width, CV_32FC3 );
cvReprojectImageTo3D(norm_disparity,depth_disparity,&t_Q,0);
CvScalar scal = cvGet2D( depth_disparity, Xlu, Ylu );
cout<<"点("<<Xlu<<","<<Ylu<<")的三维坐标为:"<<endl<<scal.val[0]<<" "<<scal.val[1]<<" "<<scal.val[2]<<endl;
摄像机标定用MATLAB标定的,标定结果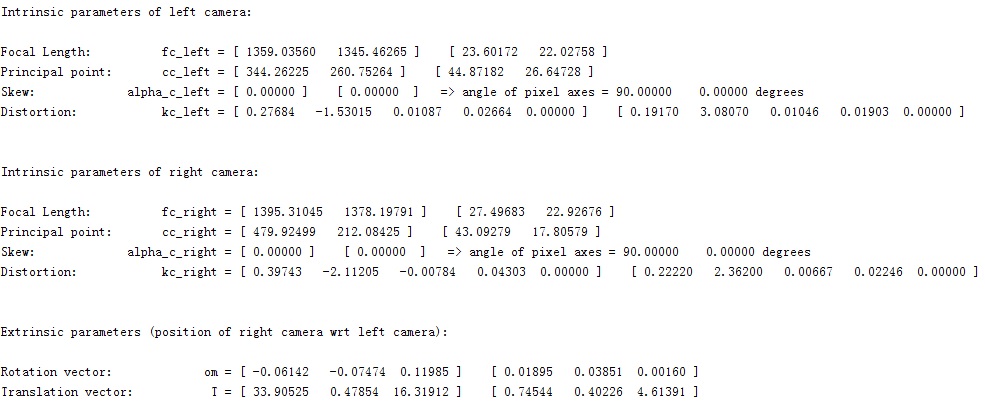
重投影矩阵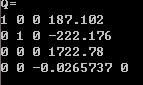
最后得到的三维坐标显示
想请问下结果出现这样的原因是什么,是哪个参数出的问题?
你用matlab算出来是多少,跟opencv算出来的差距在哪里,你得分析一下,看看是不是角点标记的不准确
好像opencv 的摄像头标记确实是跟matlab有差距
opencv需要多福图像进行标记的