有关非线性最优化手眼标定的求助帖
最近在做标定手眼关系(eye in hand )中用到非线性最优化来求解方程AX=XB,
但对于非线性最优化了解不多,理解困难。
参考文中中定义函数f,对函数f进行非线性最优化
函数f定义可见附图
始终q为四元数(用来表示旋转矩阵),t表示平移向量,R表示旋转矩阵
要优化的元素为q,t(即旋转矩阵和平移向量)
这里如何求解真是不懂,请各位赐教 help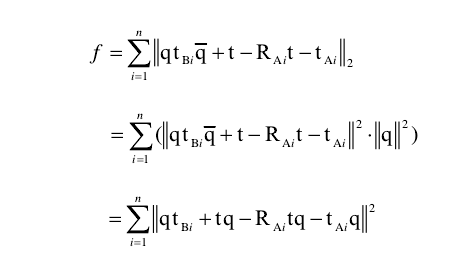
看来很少有人做这个,自己给自己顶一下
最近在做标定手眼关系(eye in hand )中用到非线性最优化来求解方程AX=XB,
但对于非线性最优化了解不多,理解困难。
参考文中中定义函数f,对函数f进行非线性最优化
函数f定义可见附图
始终q为四元数(用来表示旋转矩阵),t表示平移向量,R表示旋转矩阵
要优化的元素为q,t(即旋转矩阵和平移向量)
这里如何求解真是不懂,请各位赐教 help
看来很少有人做这个,自己给自己顶一下