ROS gazebo中无人机飞行速度与发布的速度指令不相符
在gazebo中使用了iris_opt_flow这个模型,给出了速度指令,飞行过程中发布的速度信息都没有问题,但通过rostopic echo记录到的实际速度小的异常。
初步想法是model的设置有问题
或者是PID controller的问题。
求指点。
model的sdf
<sdf version='1.5'>
<model name='iris_opt_flow'>
<include>
<uri>model://iris</uri>
</include>
<!--px4flow camera-->
<include>
<uri>model://px4flow</uri>
<pose>0.05 0 -0.05 0 0 0</pose>
</include>
<joint name="px4flow_joint" type="revolute">
<parent>iris::base_link</parent>
<child>px4flow::link</child>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
<!--lidar-->
<include>
<uri>model://lidar</uri>
<pose>0 0 -0.05 0 0 0</pose>
</include>
<joint name="lidar_joint" type="fixed">
<parent>iris::base_link</parent>
<child>lidar::link</child>
</joint>
</model>
</sdf>
<!-- vim: set et ft=xml fenc=utf-8 ff=unix sts=0 sw=2 ts=2 : -->
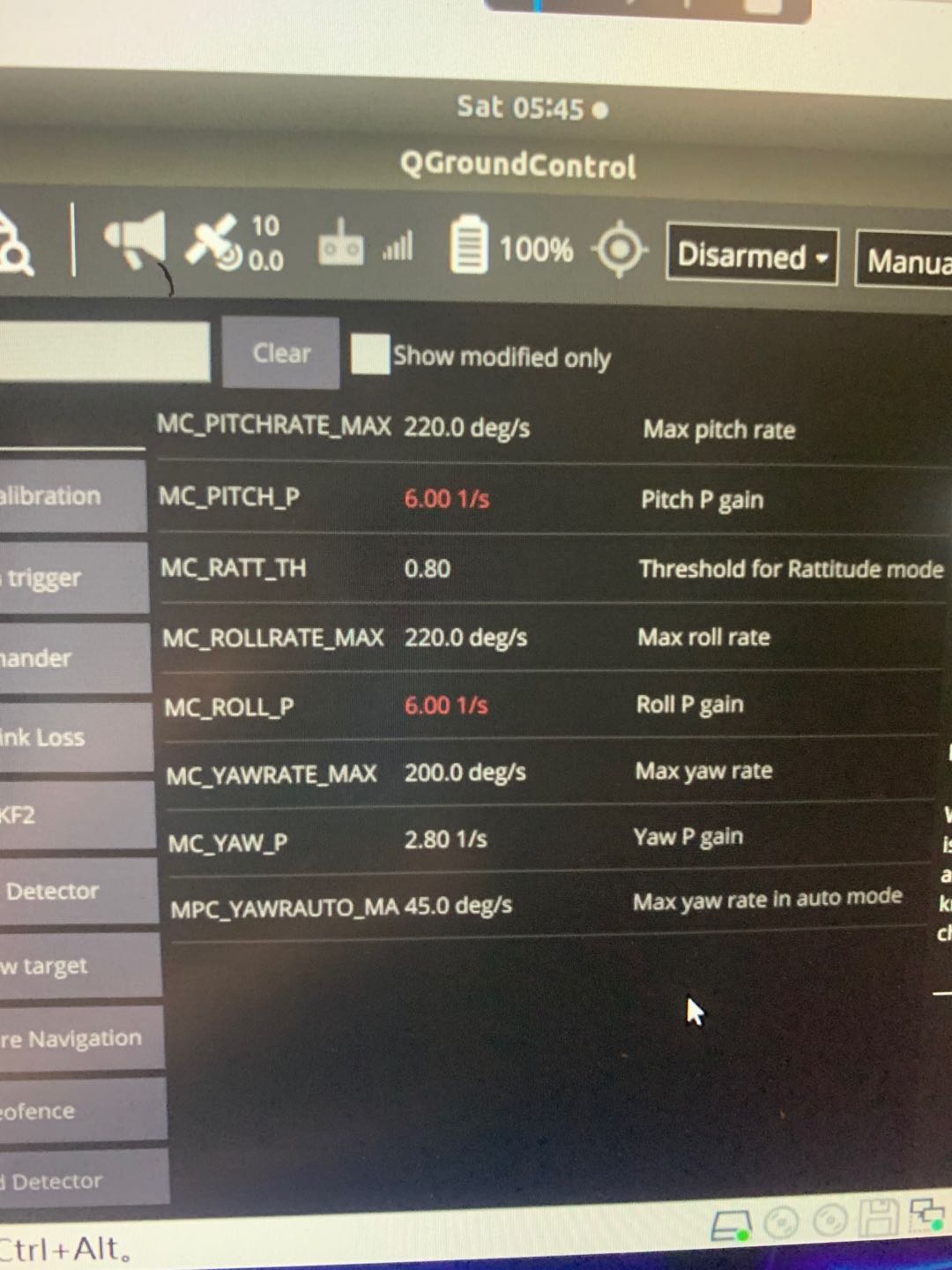
PID界面