对平面3自由度6R并联机器人进行正解分析
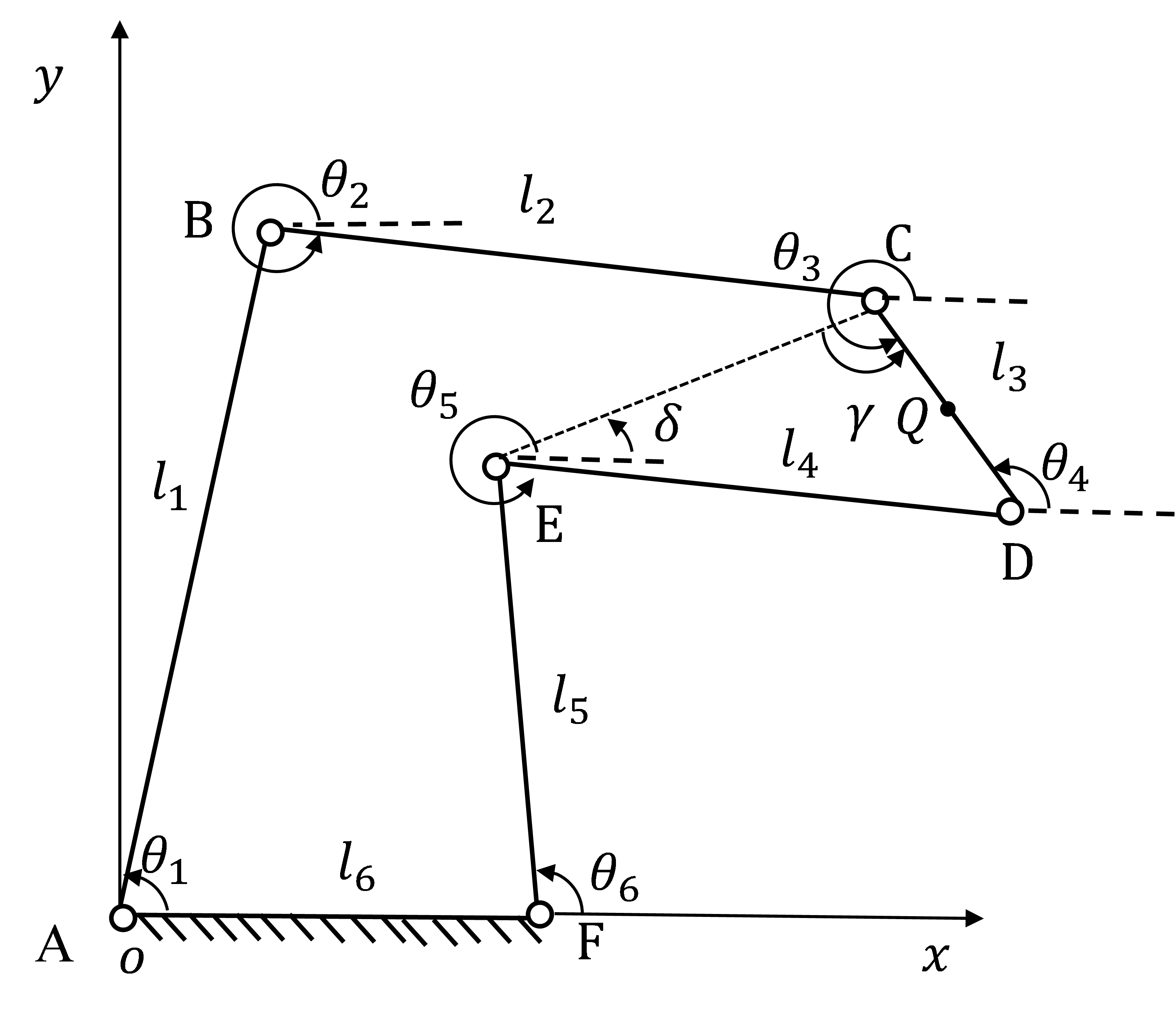
如图所示为平面3自由度6R并联机器人结构简图,假设AB=l1,BC=l2,CD=l3,DE=l4,EF=l5,AF=l6,杆CD为机构的动平台,杆AF为机架,建立固定参考坐标系o-xy,坐标原定位于AF的中心,x轴沿AF方向,y轴垂直于AF, A点在当前坐标系下的坐标值为(x,y),速度为vA,加速度为aA。三个驱动关节的转角分别为θ3,θ4,θ5,三个驱动关节的角速度为w3, w4, w5,分别对动平台参考点Q的位置坐标(xQ,yQ),速度vQ,加速度aQ进行求解。有没有什么好的办法?如果用matlab如何实现?