MATLAB D-H 机械臂建立
D-H机械臂有点懵
小白刚开始学习,想建立一个这样的DH图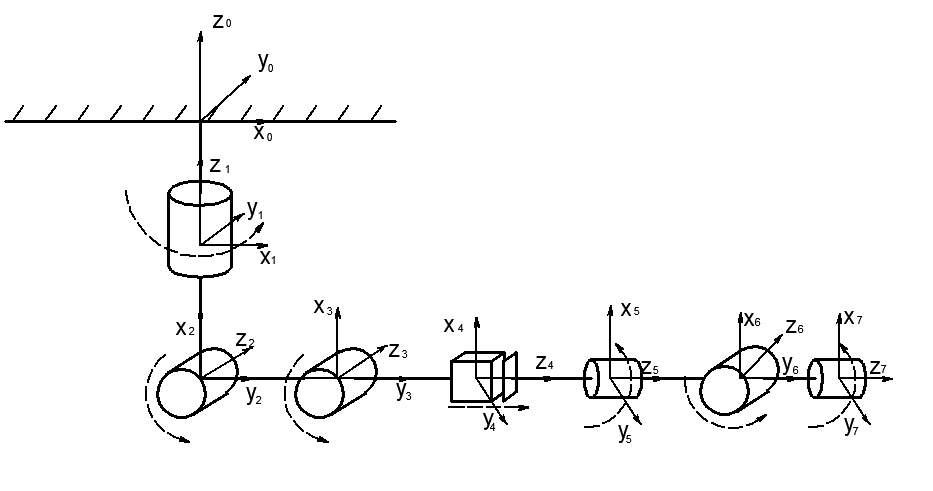
L1=Link([0 80 0 0 0],'modified');
L2=Link([0 0 100 -pi/2 0],'modified');
L3=Link([0 0 550 0 0],'modified');
L4=Link([0 100 0 pi/2 1],'modified');
L5=Link([0 300 0 0 0],'modified');
L6=Link([0 0 0 -pi/2 0],'modified');
L7=Link([0 0 300 pi/2 0],'modified');
建造出来的最后关节Z轴怎么才能平行于第6关节呢
感谢告知,不胜感激
https://blog.csdn.net/AprilsHell/article/details/90723091
大佬,同一机械臂,建立坐标系,有的是后三轴交于一点,有的却是末端坐标系单独出来,能解释一下吗大佬,就是可以末端执行器的坐标系交于一点还是末端执行器坐标系建立在法兰盘中心 这两种都可以是吗 就是得到的位姿和角度不同