想使用ORB-SLAM2进行地图保存加载和定位,尝试了众多大神的方法可以进行地图保存,但是在加载定位的时候卡在System Reseting。注释了cv::Mat System::TrackMonocular(const cv::Mat &im, const double ×tamp)中的语句也没法解决。小白求教!!
(https://img-ask.csdn.net/upload/202003/06/1583490791_197357.png)
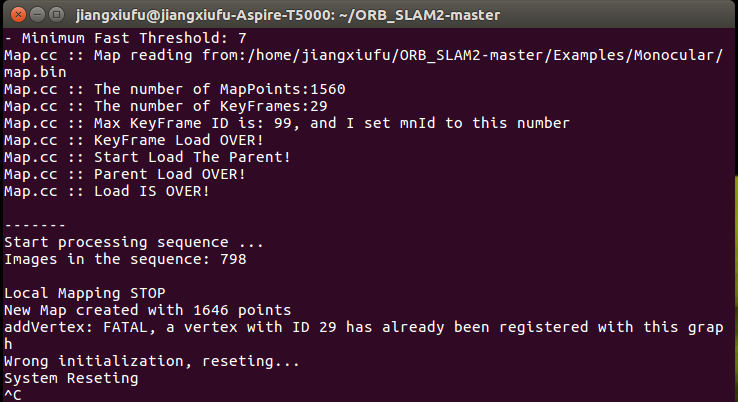
您好请问解决了吗?我是跑数据集反复Track lost soon after initialisation, reseting...
System Reseting
Reseting Local Mapper... done
Reseting Loop Closing... done
Reseting Database... done
New map created with 90 points
请问你记得当初是怎么解决的吗?我用kinect2在线跑orbslam2,一直卡在第一个画面,system reseting...
{kind=link}