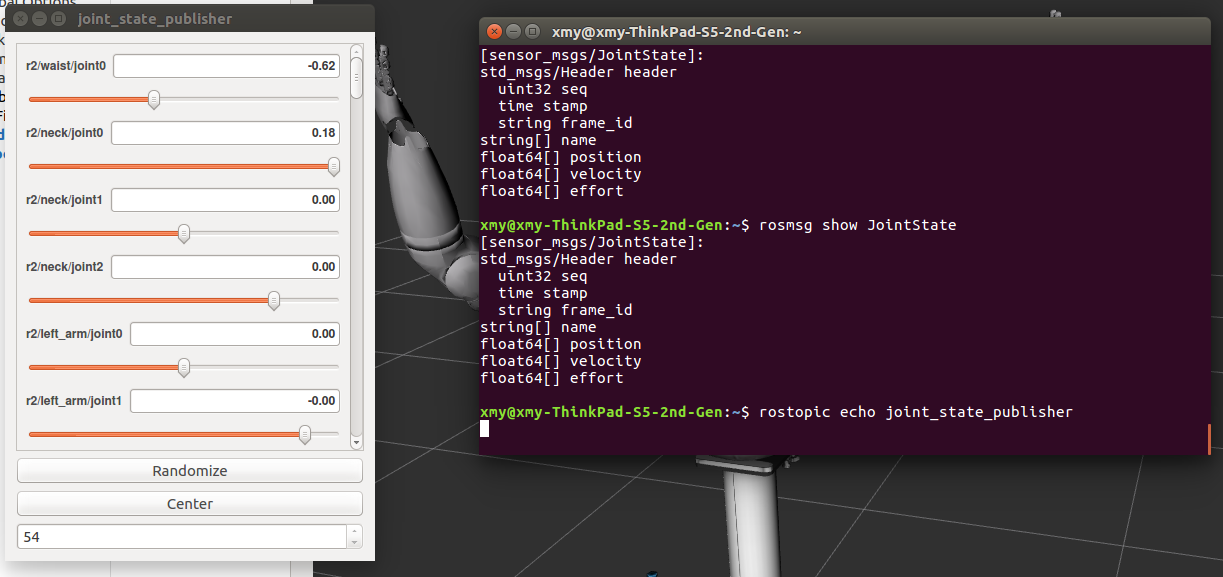
ros的joint_state_publisher可以控制urdf但是为什么监听不了joint_state_publisher的消息呢?
https://blog.csdn.net/bbtang5568/article/details/84076866